Creazione di un nuovo asse
In un progetto RTE è possibile inserire fino a 32 assi. Un asse può essere eventualmente associato ad un nodo di una rete EtherCAT o CANopen. È possibile creare assi che non sono associati a nessun dispositivo ECAT/CAN. È inoltre possibile creare assi configurati solo come trasduttore o solo come attuatore.
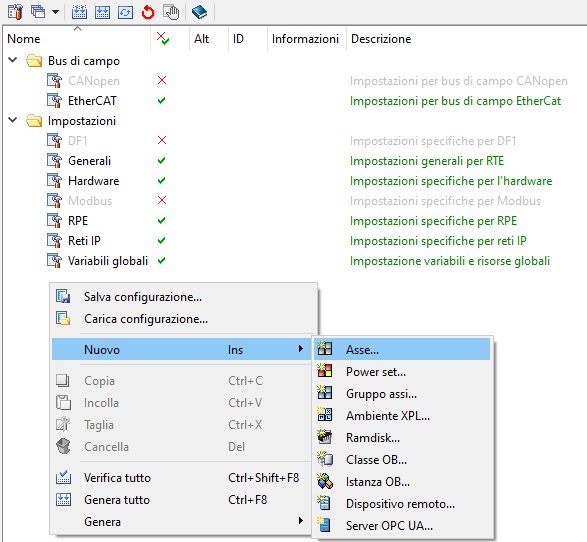
Per aggiungere un nuovo asse al vostro progetto RTE, dalla pagina del configuratore di progetto: tasto destro -> Nuovo -> Asse...
Configurazione dell'asse
Impostazioni: Generale
Nella pagina "Generale" delle impostazioni dell'asse bisogna inserire un nome per l'asse e il suo ID. Eventualmente potete inserire un nome alternativo e una descrizione. Il nome dell'asse, o eventualmente il suo nome alternativo, potrà essere usato durante la scrittura del programma con il linguaggio R3 al posto del suo ID. Per esempio per riferirsi alla posizione ideale dell'asse 1, al posto di scrivere IP(1) sarà possibile scrivere IP(axis_1) o IP(ax1).
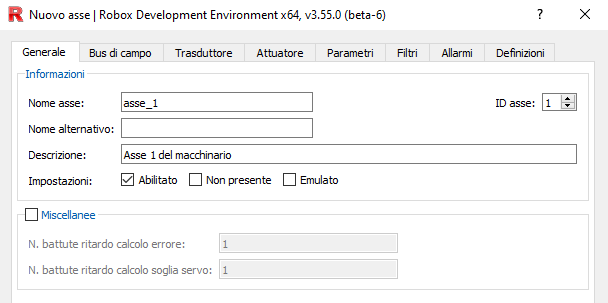
È possibile configurare il numero di cicli sincroni di sistema (detti battute di rule o semplicemente battute) per il calcolo dell'errore di posizione e la soglia errore. Solitamente si configurano nel caso l'asse sia associato a un dispositivo EtherCAT o CANopen.
Impostazioni: Bus di campo
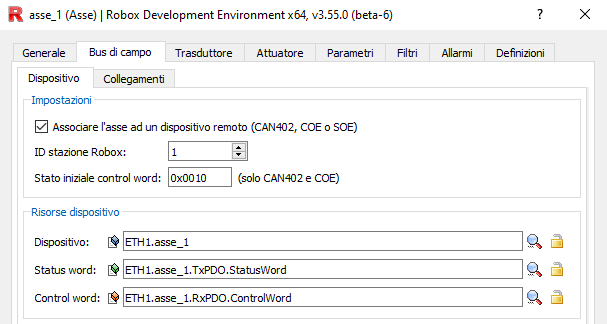
Nel caso l'asse sia associato ad un dispositivo EtherCAT o CANopen, spuntare l'opzione "Associare l'asse a un dispositivo remoto (CAN402, COE o SOE)". Potete scegliere il valore che assumerà la control word quando il controllo comincerà a comunicare con il dispositivo.
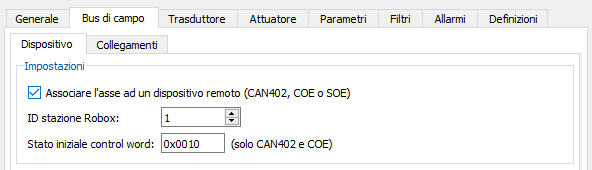
In caso di dispositivi CANopen dovrete indicare l'Id stazione Robox associato all'asse, esso serve per associare l'asse ad un nodo della rete CANopen; infatti, durante la configurazione della rete CANopen viene data la possibilità di indicare per ogni nodo l'ID del dispositivo Robox associato. L'associazione delle risorse della rete CANopen con quelle Robox viene fatta tramite l'editor CANopen.
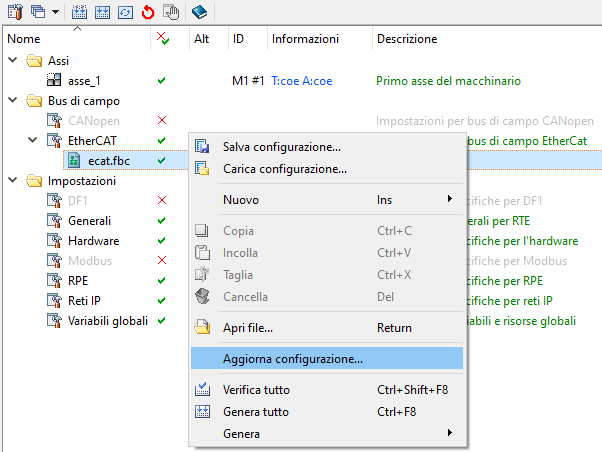
In caso di dispositivi EtherCAT bisognerà associare le risorse della rete con le risorse Robox. Nel caso abbiate già configurato la rete EtherCAT, è disponibile un comando che aggiorna automaticamente la configurazione dell'asse, associando gli oggetti standard del profilo DS402 (statusword, controlword, target velocity) con le risorse Robox: tasto destro sul file .fbc -> Aggiorna configurazione...
Il comando "Aggiorna configurazione..." può essere usato anche per creare un nuovo asse se si spunta l'apposita opzione.
NOTA: Il nome dell'asse dato nella pagina "Generale" deve corrispondere all'Etichetta del dispositivo EtherCAT, altrimenti RDE non riuscirà ad associare l'asse nella configurazione RTE con il dispositivo EtherCAT.
Se la procedura ha avuto successo, nelle pagine "Bus di campo" (vedi anche sotto-pagine "Dispositivo" e "Collegamenti"), "Trasduttore" e "Attuatore" troverete le impostazioni corrette per il vostro asse.
Per funzionare correttamente le seguenti risorse devono essere collegate:
•Sotto-pagina "Dispositivo": Dispositivo, Status word e Control word
•Sotto-pagina "Collegamenti": Posizione corrente e, a seconda del tipo di riferimento inviato all'attuatore, uno tra i seguenti: Riferimento di posizione, Riferimento di velocità, Riferimento di coppia
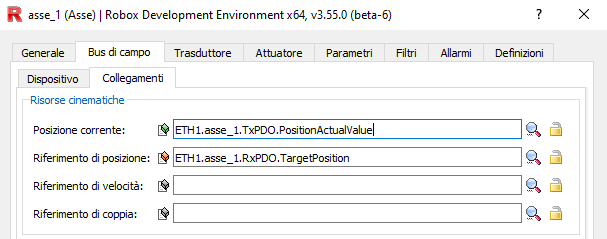
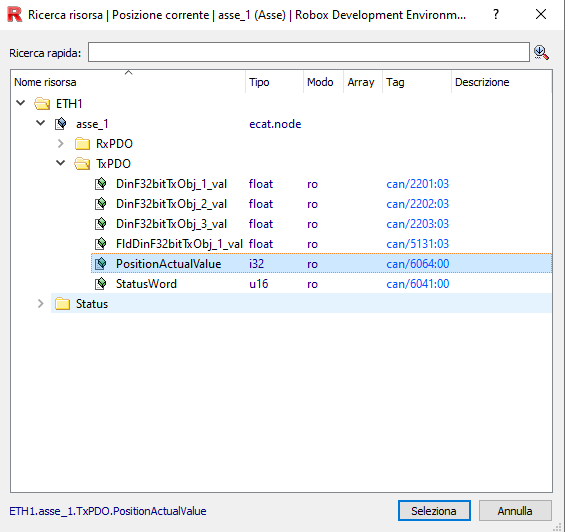
Per collegare manualmente una risorsa EtherCAT con una risorsa Robox, cliccare sulla lente d'ingrandimento sulla riga corrispondente alla risorsa Robox che volete configurare, si aprirà una finestra da cui potrete cercare e selezionare la risorsa che volete associare
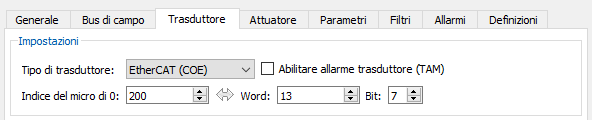
Impostazioni: Trasduttore
Il tipo di trasduttore dell'asse si seleziona tramite il menù a tendina. Eventualmente, potete scegliere di abilitare l'allarme trasduttore (tam) e indicare l'indice del micro di zero associato all'asse. I parametri disponibili dipendono dal tipo di trasduttore selezionato.
A seconda del tipo di trasduttore selezionato, saranno disponibili parametri diversi. La tabella sottostante riassume quali parametri sono disponibili a seconda del tipo di trasduttore.
Parametri |
Encoder incrementale |
Assoluto (SSI) |
Ingresso analogico |
CANopen |
Registro intero |
Registro Reale |
EtherCAT (COE) |
EtherCAT (SOE) |
Axioline locale (solo motori passo-passo) |
|---|---|---|---|---|---|---|---|---|---|
Indice trasduttore |
x |
x |
|
|
|
|
|
|
|
Offset |
|
x |
x |
|
|
|
|
|
|
Indice ingresso analogico |
|
|
x |
|
|
|
|
|
|
Valore minimo |
|
|
x |
|
|
|
|
|
|
Valore massimo |
|
|
x |
|
|
|
|
|
|
Tipo registro |
|
|
|
|
x |
x |
|
|
|
Indice registro |
|
|
|
|
x |
x |
|
|
|
Freq. comunicazione |
|
x |
|
|
|
|
|
|
|
Tipo di drive |
|
|
|
x |
|
|
x |
x |
|
Parametro ausiliario 1 |
|
|
|
x |
|
|
x |
x |
|
Uso trasduttore |
|
x |
|
x |
x |
x |
x |
x |
x |
Posizione asse ritentiva |
x |
|
|
x |
x |
x |
x |
x |
x |
Micro di 0 interno |
|
|
|
|
|
|
x |
|
|
Dimensione dati |
|
x |
x |
x |
x |
|
x |
x |
x |
Dimensione dati assoluti |
|
|
|
x |
|
|
x |
x |
|
Registro allarme trasduttore |
|
|
|
x |
x |
x |
x |
x |
|
Slot in bus Axioline |
|
|
|
|
|
|
|
|
x |
Indice canale scheda |
|
|
|
|
|
|
|
|
x |
Di seguito trovate la descrizione dei singoli parametri:
•Indice trasduttore: indice del trasduttore da usare come trasduttore per l'asse. L'indice trasduttore viene associato ai dispositivi connessi al controllo nella configurazione hardware
•Offset: offset da sottrarre al valore letto dal trasduttore
•Indice ingresso analogico: indice dell'ingresso analogico da usare come trasduttore
•Valore minimo: valore minimo rilevabile sotto il quale viene generato l'allarme trasduttore
•Valore Massimo: valore massimo rilevabile sotto il quale viene generato l'allarme trasduttore
•Tipo registro: selezione del tipo di registro, volatile o ritentivo
•Indice registro: indice del registro che si desidera usare come trasduttore
•Freq. comunicazione: frequenza della comunicazione SSI
•Tipo di drive: in caso il trasduttore sia associato ad un dispositivo EtherCAT/CANopen, bisogna scegliere dal menù a tendina il tipo di drive
•Parametro ausiliario 1: parametro ausiliario il cui significato dipende dal tipo di drive
•Uso trasduttore: questa opzione indica come deve essere letto il dato della posizione che arriva da trasduttore:
oIncrementale - la posizione viene letta dal trasduttore ad ogni battuta di rule e sommata alla posizione ottenuta alla battuta di rule precedente
oAssoluto - la posizione letta è assunta direttamente dal trasduttore ad ogni battuta di rule
oSemi assoluto - la posizione letta è assunta direttamente dal trasduttore ad ogni battuta di rule, tenendo conto del numero di bit assoluti
•Caratteristiche - Posizione asse ritentiva: questa opzione serve per indicare che il trasduttore è di tipo ritentitivo e quindi abilita la gestione della posizione dell'asse ritentiva
•Caratteristiche - Micro di 0 interno: questa opzione serve per indicare che si desidera utilizzare il micro di 0 interno del trasduttore
•Dimensione dati: questa opzione indica la dimensione dei dati totale che arrivano dal trasduttore in numero di bit
•Dimensione dati assoluti: questa opzione indica quanti bit dei dati che arrivano da trasduttore sono assoluti
•Registro allarme trasduttore: questa opzione serve se l'utente desidera gestire l'allarme trasduttore, indica il numero del registro che indica la presenza di un allarme. Se il valore del registro è diverso da zero verrà emesso l'allarme trasduttore, altrimenti no
•Slot in bus Axioline: utilizzato solo per motori passo-passo. Indice slot del bus Axioline del dispositivo da usare come trasduttore per l'asse
•Indice canale scheda: utilizzato solo per motori passo-passo. Indice del canale della scheda Axioline da usare come trasduttore per l'asse
NOTA: Vedi anche Configurazione trasduttore per fieldbus.
Impostazioni: Attuatore
Il tipo di attuatore dell'asse si seleziona tramite il menù a tendina. È sempre possibile indicare se il riferimento dato all'asse è di velocità (sref) o di coppia (tref), mentre il riferimento di posizione è disponibile solo per gli attuatori di tipo EtherCAT(COE), EtherCAT (SOE) e CANopen.

A seconda del tipo di attuatore selezionato, saranno disponibili parametri diversi. La tabella sottostante riassume quali parametri sono disponibili a seconda del tipo di attuatore.
Parametri |
Uscita analogica |
CANopen |
Registro intero |
Registro Reale |
Output word |
EtherCAT (COE) |
EtherCAT (SOE) |
Axioline locale (solo motori passo-passo) |
|---|---|---|---|---|---|---|---|---|
Indice uscita analogica |
x |
|
|
|
|
|
|
|
Tipo di uscita |
x |
|
|
|
|
|
|
|
indice registro per offset |
x |
|
|
|
|
|
|
|
Dimensione dati |
x |
x |
x |
|
x |
x |
x |
|
Canale sel. direzione positiva |
x |
|
|
|
|
|
|
|
Canale sel. direzione negativa |
x |
|
|
|
|
|
|
|
Tipo di drive |
|
x |
|
|
|
x |
x |
|
Riferimento di posizione |
|
x |
|
|
|
x |
x |
|
Tipo di registro |
|
|
x |
x |
|
|
|
|
Indice registro |
|
|
x |
x |
|
|
|
|
Indice output word |
|
|
|
|
x |
|
|
|
Registro diagnostica dati |
|
|
|
|
|
|
|
x |
Di seguito trovate la descrizione dei singoli parametri:
•Indice uscita analogica: indice dell'uscita analogica da usare come riferimento per l'asse
•Tipo di uscita: indica se il riferimento utilizza qualsiasi valore oppure solo valori positivi o solo negativi
•Indice registro per offset: indice di un registro intero volatile contenente l'offset da sommare al riferimento per l'asse
•Dimensione dati: dimensione in bit del riferimento
•Canale sel. direzione positiva: indice del canale di uscita digitale per la direzione di marcia positiva
•Canale sel. direzione negativa: indice del canale di uscita digitale per la direzione di marcia positiva
•Tipo di drive: il tipo di drive associato all'attuatore
•Caratteristiche - riferimento di posizione: abilita il riferimento di posizione, il riferimento passato all'asse sarà uguale alla posizione ideale
•Tipo registro: scelta tra registro volatile o ritentivo da usare come riferimento per l'asse
•Indice registro: indice del registro da usare come riferimento per l'asse
•Indice output word: indice della output word da usare come riferimento per l'asse
•Registro diagnostica dati: utilizzato solo per motori passo-passo. Indice del primo degli otto registri interi consecutivi da usare come diagnostica
Impostazioni: Parametri
Nella pagina "Parametri" è possibile impostare i parametri dell'asse. I valori impostati in questa pagina verranno scritti durante l'avviamento del controllo. Fare attenzione, in quanto questi parametri sono di default ritentivi, se un parametro non viene abilitato in questa pagina non viene scritto durante l'avviamento del controllo e il suo valore sarà uguale all'ultimo valore impostato.
Di seguito trovate i link alle descrizioni dei singoli parametri.
•kff
Impostazioni: Filtri
In questa pagina è possibile impostare i filtri dell'anello di posizione. Fare riferimento alla documentazione apposita: Filtri anello di posizione.
Impostazioni: Allarmi
In questa pagina è possibile abilitare la generazione degli allarmi relativi all'asse. La generazione di ogni allarme è abilitata settando a 1 il bit della corrispondente maschera a bit (bit 0 per l'asse 1, bit 1 per l'asse 2 ecc.).
Maschera a bit |
Condizione di emissione dell'allarme |
Parametri dell'asse coinvolti |
Allarme emesso |
|---|---|---|---|
L'errore di posizione supera la soglia servo |
|||
La posizione ideale supera il limite dei paracarri |
allarme 14 - lower limit reached/allarme 15 - upper limit reached |
||
La velocità ideale supera la massima velocità |
|||
L'accelerazione ideale supera l'accelerazione massima |
Impostazioni: Definizioni
In questa pagina è possibile creare delle costanti da usare nei programmi R3 o R++. Cliccando sull'icona con il simbolo "+" verde viene data la possibilità di inserire literally R3, literally R++ e Maschere a bit.