Tipicamente in caso di interfacciamento ai drive mediante fieldbus, l'anello di posizione viene chiuso direttamente sul drive. Alla frequenza delle Rule, infatti, RTE scambia i dati contenuti nei PDO e calcola la nuova IP (Ideal Position) per gli assi controllati.
Se gli azionamenti vengono configurati in controllo di velocità, l'utente può far chiudere l'anello di posizione direttamente al Motion Controller come segue:
•Utilizzando la chiusura del loop di posizione di default che prevede una componente proporzionale (PRO_GAI) e una di feed forward di velocità (KFF)
•Scrivendo il codice del proprio PID a livello RULE negli appositi campi REF
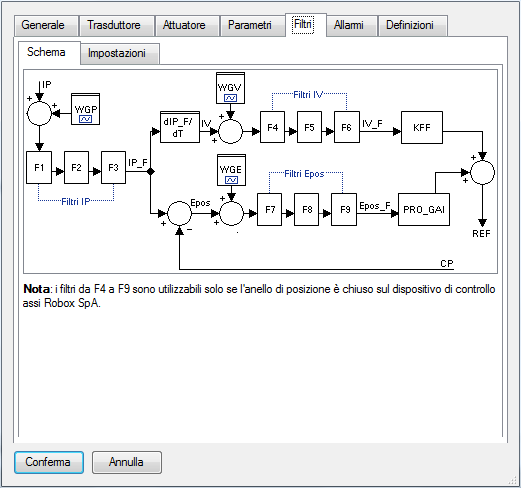
Da RTE 33.4 esiste la possibilità di inserire dei filtri low-pass o notch nel caso si chiuda l'anello di posizione all'interno del controllo Robox.
Tipico utilizzo è la ricerca di miglioramento delle performance di strutture robotiche andando a filtrare le frequenze di risonanza meccaniche.
È possibile inserire fino a tre filtri i cascata sulla generazione della Ideal Position (IP), tre sulla Ideal Velocity (IV) e tre sull'errore di posizione (EPOS)
Inoltre è possibile inserire tre wave generator (vedi sotto) al fine di studiare/analizzare il comportamento della meccanica.
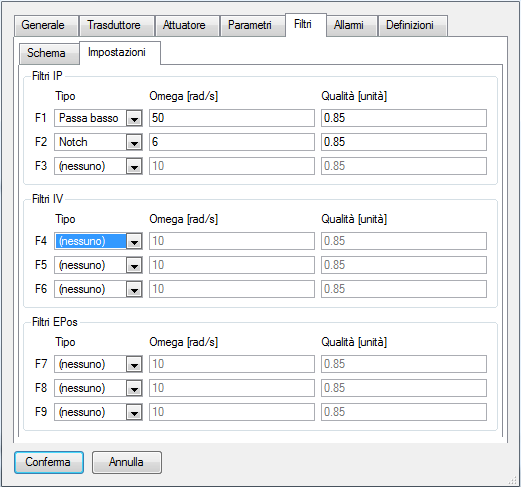
La configurazione dei filtri avviene da configuratore di progetto tab-->configurazione-->assi-->filtri.
Tipologie di filtri
Filtri utilizzabili |
Tipologia |
Parametri |
Descrizione |
|---|---|---|---|
Filtri sulla generazione della IP (Ideal Position) •F1_TYPE (primo filtro) •F2_TYPE (secondo filtro) •F3_TYPE (terzo filtro) |
0 disabilitato 1 notch 2 lowpass
|
Omega [rad/sec] -> frequenza * DUEPI •F1_OMEGA •F2_OMEGA •F3_OMEGA Il valore è limitato al 15% della frequenza delle rule * DUEPI |
Nella variabile IP_F viene computata la posizione ideale (eventualmente) filtrata. Se nessun filtro è impostato su IP si evince che IP_F = IP La IV viene calcolata come segue: •Se IP non è stata filtrata la IV è calcolata canonicamente, ossia IVt = (IPt -IP t-1) / SI •Se IP è stata filtrata (quindi IP <> IP_F) si ricalcola la IV di riferimento usando IP_F, ossia IVt = (IP_Ft -IP_F t-1) / SI RTE mette a disposizione un buffer circolare contenente le IP_F computate nelle 32 battute precedenti. Per l'accesso utilizzare la funzione P_IP_F(ax,idx) NOTA: I filtri su IP (F1-:-F3) sono sempre validi indipendentemente da chi effettua la chiusura degli anelli di posizione. |
Fattore di Qualità [unit] •F1_Q •F2_Q •F3_Q Il valore è limitato a non essere più piccolo di 0.75 per i lowpass e 0.2 per i notch |
|||
Filtri sulla generazione della IV (Ideal Velocity) •F4_TYPE (primo filtro) •F5_TYPE (secondo filtro) •F6_TYPE (terzo filtro) |
0 disabilitato 1 notch 2 lowpass
|
Omega [rad/sec] -> frequenza * DUEPI •F4_OMEGA •F5_OMEGA •F6_OMEGA Il valore è limitato al 15% della frequenza delle rule * DUEPI |
Nella variabile IV_F viene computata la velocità ideale (eventualmente) filtrata. Se nessun filtro è imposto su IV si evince che IV_F = IV Il valore di IV_F viene quindi utilizzato nel calcolo automatico del riferimento di velocità: •SREF(ax) = ......+ IV_F(ax) * K_FF (ax) RTE mette a disposizione un buffer circolare contenente le IV_F computate nelle 32 battute precedenti. Per l'accesso utilizzare la funzione P_IV_F(ax,idx) NOTA: I filtri su velocità (F3-:F6) sono usabili solo se il controllo genera un riferimento di velocità. |
Fattore di Qualità [unit] •F4_Q •F5_Q •F6_Q Il valore è limitato a non essere più piccolo di 0.75 per i lowpass e 0.2 per i notch |
|||
Filtri sull'EPOS (Errore di posizione) •F7_TYPE (primo filtro) •F8_TYPE (secondo filtro) •F9_TYPE (terzo filtro)
|
0 disabilitato 1 notch 2 lowpass |
Omega [rad/sec] -> frequenza * DUEPI •F7_OMEGA •F8_OMEGA •F9_OMEGA Il valore è limitato al 15% della frequenza delle rule * DUEPI |
Nella variabile EPOS_F viene computato l'errore di posizione (eventualmente) filtrato. Se nessun filtro è imposto su EPOS si evince che EPOS_F =EPOS Il valore di EPOS_F viene utilizzato nel calcolo automatico del riferimento di velocità: •SREF(ax) = EPOS_F(ax) * PRO_GAI(Ax) + ...... NOTA: I filtri sull'errore (F7-:-F9) sono usabili solo se il controllo genera un riferimento di velocità. |
Fattore di Qualità [unit] •F7_Q •F8_Q •F9_Q Il valore è limitato a non essere più piccolo di 0.75 per i lowpass e 0.2 per i notch |
NOTA: EPOS(ax) = P_IP_F(ax, idx) - CP(ax)
NOTA: SREF(ax) = EPOS_F(ax) * PRO_GAI(Ax) + IV_F(ax) * K_FF (ax)
Tipologie di wave generator
Per permettere al programmatore di analizzare al meglio ed ottimizzare i parametri dei filtri RTE offre un generatore di onde sinusoidali, triangolari o quadre sull'asse specificato.
NOTA: Abilitando i generatori di onde il loro effetto è rilevabile rispettivamente su EPOS_F, IP_F ed IV_F p (anche se nessun filtro è applicato).
Usando il generatore su IP si ha come effetto collaterale che l'uso della velocità ideale dell'asse è equivalente ad aver un filtro su IP.
Wave generator su IP
Impostare WGP_TYPE come segue:
•0 off
•1 sinusoidal
•2 triangle
•3 square wave
Impostare WGP_FREQ frequenza dell'onda per IP [hz].
Impostare WGP_AMP valore in unit di IP ampiezza dell'onda [axis unit] .
Attivare le precedenti impostazioni sull'asse desiderato: WGP_ON_AX asse su cui generare l'onda.
NOTA: Nella variabile WGP_OUT è possibile osservare il valore in unit di IP del valore in uscita dovuto alla generazione dell'onda. [axis unit]
Wave generator su IV
Impostare WGV_TYPE come segue:
•0 off
•1 sinusoidal
•2 triangle
•3 square wave
Impostare WGV_FREQ frequenza dell'onda per IV [hz].
Impostare WGV_AMP valore in unit di IV ampiezza dell'onda [axis unit/sec].
Attivare le precedenti impostazioni sull'asse desiderato: WGV_ON_AX asse su cui generare l'onda.
NOTA: Nella variabile WGV_OUT è possibile osservare il valore in unit di IP del valore in uscita dovuto alla generazione dell'onda. [axis unit/sec]
Wave generator su EPOS (Errore di posizione)
Impostare WGE_TYPE come segue:
•0 off
•1 sinusoidal
•2 triangle
•3 square wave
Impostare WGE_FREQ frequenza dell'onda per IV [hz].
Impostare WGE_AMP valore in unit di IV ampiezza dell'onda [axis unit] .
Attivare le precedenti impostazioni sull'asse desiderato: WGE_ON_AX asse su cui generare l'onda.
NOTA: Nella variabile WGE_OUT è possibile osservare il valore in unit di IP del valore in uscita dovuto alla generazione dell'onda. [axis unit]