Introduzione
Da RTE 34.18.9 è possibile pilotare dispositivi AXIOLINE.
È possibile gestire con il controllo assi fino a 63 moduli I/O.
Per la loro configurazione utilizzare da finestra di progetto tab configurazione --> impostazioni --> hardware.
I moduli hanno parametrizzazione ritentiva. È buona norma inizializzarli a tutte le accensioni in modo tale, in caso di sostituzione del modulo, di avere una corretta configurazione.
Lo stato degli ingressi viene letto nel momento medesimo a cui si accede al canale. Lo stato delle uscite viene rinfrescato, se non "overridato" mediante il bit 24 della variabile predefinita SYS_CFG, alla frequenza di sistema.
NOTA: Per avere una maggiore diagnostica riguardante lo stato e gli eventuali allarmi presenti, utilizzare il comando mreport.
Segnalibri
Argomenti correlati
Configurazione dei moduli via Axiobus
La connessione via Axiobus è possibile solo per i controlli assi RP-X.
Da progetto RDE, aprire "scheletro di partenza" --> "Configurazione" --> "Hardware", inserire il dispositivo utilizzato (es. RP1), selezionare quindi la cartella "Moduli Axioline", premere il tasto INS e inserire i moduli collegati via AXIOLINE in ordine dal più vicino al controllo al più lontano (questi moduli avranno tutti Robox ID: r.id=0).
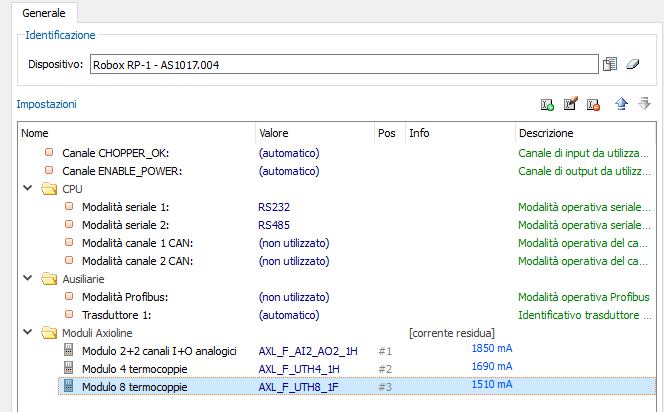
NOTA: Il numero che si trova nella colonna "Pos" equivale allo slot assegnato al modulo, e che serve (così come il r.id) per poter utilizzare le funzioni/direttive relative ai moduli AXIO.
Premere due volte su ogni modulo Axioline inserito per aggiungere gli ulteriori parametri richiesti. Per la maggior parte dei moduli axioline, l'unico parametro a disposizione è l'indirizzamento I/O dei moduli (vedi qui sotto).
Indirizzamento dei moduli
Quando viene inserito un modulo Axioline gli vengono associati un determinato numero di input word e output word.
NOTA: Vedere nel dettaglio i singoli moduli axioline per capire per cosa vengono utilizzate le input/output word associate ad esso.
Le word associate al modulo vengono impostate dal configuratore hardware, premendo due volte su ogni modulo Axioline inserito. Se viene inserito un numero le word associate partiranno da esso, altrimenti se viene lasciato automatico ci penserà RTE a impostare l'indirizzamento.
Inoltre, a prescindere dal modulo inserito, vengono allocati 16 input e output word per l'axioline driver. In particolare le prime 4 input word conterranno:
•BUS STATE: Contiene lo stesso valore del "diagnostic status register". Qui sotto è riportata la tabella del relativo significato dei bit:
Bit |
Designazione |
Significato |
|
|---|---|---|---|
0 |
F_PW_BIT |
I/O warning |
Almeno un dispositivo indica un "I/O warning" |
1 |
F_PF_BIT |
I/O error |
Almeno un dispositivo indica "I/O error" |
2 |
F_BUS_BIT |
Bus error |
Si è verificato un errore sul bus |
3 |
F_CTRL_BIT |
Controller error |
Il driver ha rilevato un errore interno |
4 |
- |
- |
Riservato |
5 |
F_RUN_BIT |
Run |
I data cycles sono stati scambiati, i dati di output sono abilitati |
6 |
F-ACTIVE_BIT |
Active |
Configurazione attiva, PDI del dispositivo possibile, scambio di dati con process data non validi/non abilitati |
7 |
F_READY_BIT |
Ready |
Il local bus master è pronto per l'operazione, nessuno scambio di dati fuori dal bus |
8 |
F_BD_BIT |
Bus different |
Un dispositivo non appartenente alla configurazione corrente è stato rilevato nell'ultima interfaccia |
9 |
F_BASP_BIT |
SYS_FAIL |
Il controllore è in uno stato di stop o non sono stati caricati programmi applicativi. L'output è bloccato (il valore sostitutivo è attivo) |
10 |
F_FORCE_BIT |
Force mode |
Modalità forzatura attiva (strumento di avvio/controllo I/O) |
11 |
F_SYNC_BIT |
Synchronization |
La sincronizzazione tra sistema a più alto livello e local bus master è fallita |
12 |
F_PARA_REQ |
Module parameter |
Almeno un dispositivo richiede parametri |
13 |
- |
- |
Riservato |
14 |
- |
- |
Riservato |
15 |
- |
- |
Riservato |
•DIAGNOSTIC PARAMETERS: Contiene il codice di un eventuale errore presente in uno dei moduli Axioline. Il significato del codice di errore lo si può trovare nel data sheet del relativo modulo, oppure nel manuale "UM EN AXL F SYS DIAG", scaricabile dal sito della Phoenix Contact
•ADDITIONAL INFO: Indica la posizione del modulo in questione
•DEVICE COUNT: Indica il numero di moduli Axioline presenti
NOTA: Non vengono considerati i moduli SAFETY.
I metodi per capire l'indirizzamento dei moduli sono due:
•Leggere il file RHW.CFG (metodo più semplice), dove sono presenti la lista di tutte le input e output word utilizzate dal controllo, il modulo Axioline al quale sono associate e una descrizione del loro contenuto
•Utilizzare da task l'istruzione GET_HW_INFO (metodo da usare se si vuole gestire tutto quanto da progetto)
Esempio
Abbiamo un controllo RP-1 con collegati via Axioline questi moduli (dal più vicino al più lontano): Primo modulo: AXL_F_DO64_1_2F modulo 64 canali output digitali, occupa 4 word Secondo modulo: AXL_F_AI2_AO2_1H modulo 2+2 canali I/O analogici, occupa 2 word Terzo modulo: AXL_F_DI_16_1_1H 1 modulo 16 canali input digitali, occupa 1 word
Allora le word verranno così disposte: RP-1: OUT_W 1 -:- 19, INP_W 1 -:- 19 Axl_driver: OUT_W 20 -:- 35, INP_W 20 -:- 35 Primo modulo: OUT_W 36 -:- 39, INP_W 36 -:- 39 (anche se le input non saranno utilizzate) Secondo modulo: OUT_W 40 -:- 41, INP_W 40 -:- 41 Terzo modulo: OUT_W 42, INP_W 42 (anche se l'output non sarà utilizzata) |
Configurazione dei moduli via EtherCAT
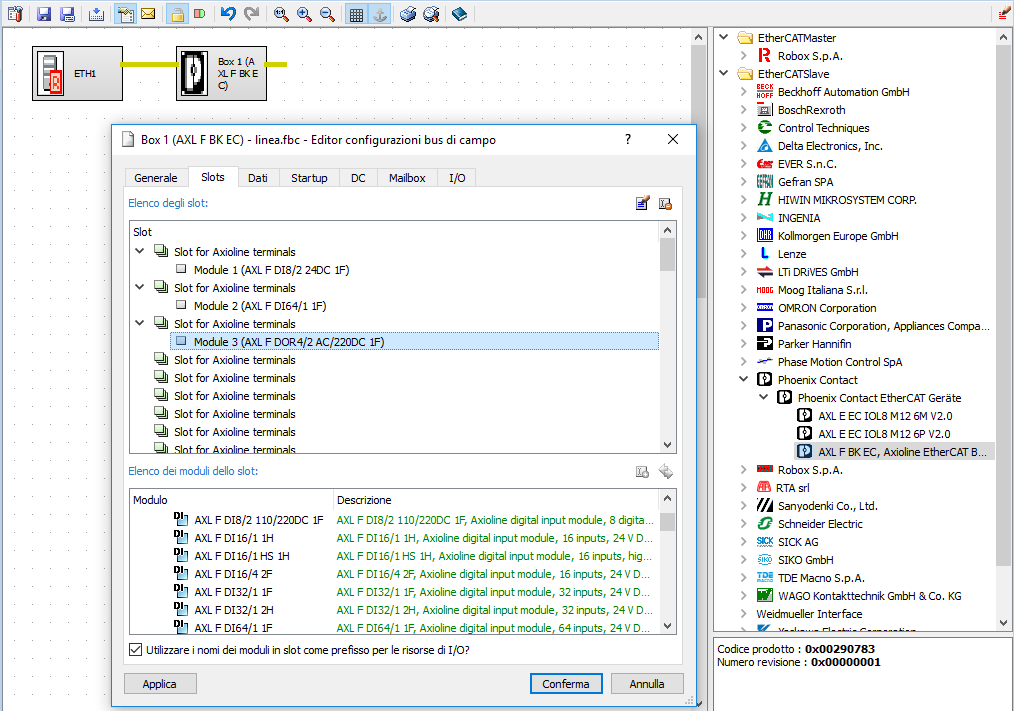
Per poter funzionare connessi tramite linea EtherCAT, gli axioline hanno bisogno del modulo AXL_F_BK_EC.
Inserire sulla linea EtherCAT il modulo AXL_F_BK_EC, fare doppio click su di esso e sotto "slots" inserire i successivi moduli Axio collegati. In questo caso il modulo con la scritta "Module 1" avrà associato lo slot 1, quello con "Module 2" avrà lo slot 2 e così via.
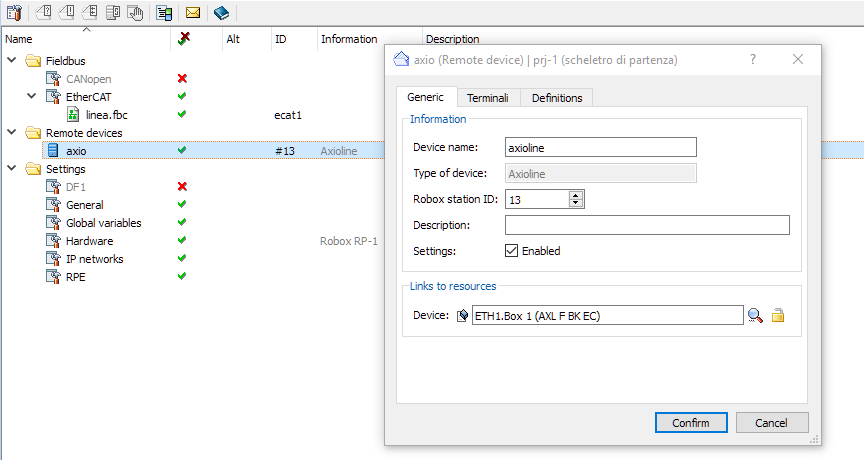
Generata la configurazione EtherCAT, tornare alla configurazione del progetto e premere il tasto destro del mouse, "Nuovo" --> "Dispositivo Remoto..." --> "Axioline", impostare quindi tutti i parametri in Generale, Terminali e Definizioni.
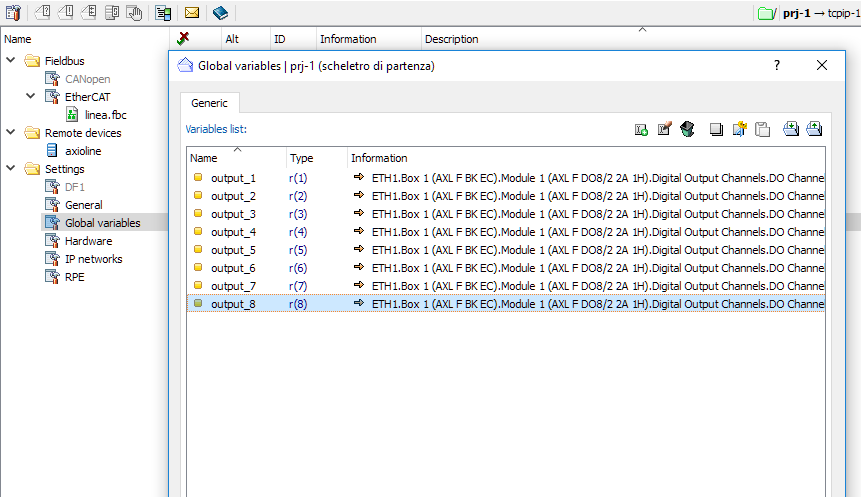
Selezionare "Variabili globali" per associare le variabili contenute nei PDO alle variabili del controllo assi (variabili globali).
NOTA: Per maggiori informazioni sulla creazione di una linea EtherCAT, premere qui.
Configurazione dei moduli via Ethernet (Modbus/TCP)
Per poter funzionare connessi tramite linea Ethernet comunicando via Modbus/TCP, gli axioline hanno bisogno del modulo AXL_F_BK_ETH.
Per la configurazione, è sufficiente avere il file PCMBC.CFG nella flash.
I moduli che comunicano via Modbus/TCP vanno parametrizzati attraverso i comandi modbus client, e non utilizzando AXIO_ROBJ e AXIO_WOBJ.
NOTA: Non tutti i moduli axioline possono essere utilizzati con questa configurazione, per vedere i moduli disponibili, vedere il file PCMBC.CFG.
Comandi dispositivo e funzioni disponibili
Tali comandi e funzioni sono anche utilizzabili nel caso i dispositivi siano connessi sulla linea EtherCAT tramite il bus coupler AXL_F_BK_EC.
Comandi disponibili (utilizzabili da shell e da file STP):
Direttiva per leggere oggetti su fieldbus Axioline |
|
Direttiva per scrivere oggetti su fieldbus Axioline |
Funzioni disponibili (utilizzabili da programma):
AXIO_ROBJ |
Funzione per leggere oggetti su fieldbus Axioline |
AXIO_WOBJ |
Funzione per scrivere oggetti su fieldbus Axioline |
Funzioni per IOlink master (AXL_SE_IOL4) (configuratore IOLink non gestito):
AXIO_IOL_R |
Funzione per leggere un'area dati da IOlink master noto |
AXIO_IOL_W |
Funzione per scrivere un'area dati su IOlink master noto |
Altri comandi e funzioni disponibili:
Direttiva per abilitare i diritti esclusivi dei moduli axioline |
|
AXIO_PM_R |
Funzione per leggere un'area dati da modulo AXL_F_PM_EF_1F |
Direttiva per aggiornare i fw dei moduli RO-AXIO_SE_STP2 |
Keywords Axioline
SYS_FLAG.18 |
Abilita report diagnostica su lettura asincrona oggetti Axioline interni |
|---|---|
SYS_CFG_2.20 |
Imposta la modalità attiva del bus Axioline locale quando la modalità operativa è cambiata in loading |
SYS_CFG_2.23 |
Le aree di input e output degli AXL_F_BK_ETH (PCMBC) non sono più aggiornate quando si è in modo loading. I valori degli output fisici impostati quando il controllo è in modo loading dipendono dalla configurazione dei vari dispositivi |
Definisce un dispositivo remoto AXL_SE_IOL4 connesso ad un AXL_F_BK_EC |
|
Definisce uno o più terminali AXL_F_PM_EF_1F su device ECAT |
Elenco moduli Axioline
In tabella sono presenti tutti i moduli utilizzabili via Axioline che possono essere gestiti tramite progetto RDE.
NOTA: Nell'elenco non sono presenti i moduli SAFETY, in quanto vengono configurati in maniera diversa.
Moduli |
Descrizione |
Input Word |
Output Word |
|---|---|---|---|
Input digitali: |
|
|
|
modulo 16 canali input digitali |
1 |
0 |
|
modulo 16 canali input digitali |
1 |
0 |
|
modulo 16 canali input digitali |
1 |
0 |
|
modulo 32 canali input digitali |
2 |
0 |
|
modulo 32 canali input digitali |
2 |
0 |
|
modulo 64 canali input digitali |
4 |
0 |
|
|
|
|
|
Output digitali: |
|
|
|
modulo 4 canali output digitali |
0 |
1 |
|
modulo 8 canali output digitali |
0 |
1 |
|
modulo 16 canali output digitali |
0 |
1 |
|
modulo 16 canali output digitali |
0 |
1 |
|
modulo 16 canali output digitali |
0 |
1 |
|
modulo 32 canali output digitali |
0 |
2 |
|
modulo 64 canali output digitali |
0 |
4 |
|
|
|
|
|
I/O digitali: |
|
|
|
modulo 8+8 canali I/O digitali |
1 |
1 |
|
modulo 8+8 canali I/O digitali |
1 |
1 |
|
modulo 16+8 canali I/O digitali |
1 |
1 |
|
modulo 16+16 canali I/O digitali |
1 |
1 |
|
|
|
|
|
Input analogici: |
|
|
|
modulo 4 canali input analogici (I) |
4 |
0 |
|
modulo 4 canali input analogici (V) |
4 |
0 |
|
modulo 8 canali input analogici |
8 |
0 |
|
|
|
|
|
Output analogici: |
|
|
|
modulo 4 canali output analogici |
4 |
4 |
|
modulo 8 canali output analogici |
8 |
8 |
|
|
|
|
|
I/O analogici: |
|
|
|
modulo 2+2 canali I/O analogici |
2 |
2 |
|
|
|
|
|
Termocoppie: |
|
|
|
modulo 4 termocoppie |
5 |
1 |
|
modulo 8 termocoppie |
9 |
1 |
|
|
|
|
|
Termoresistenze: |
|
|
|
modulo 4 termoresistenze |
4 |
0 |
|
modulo 8 termoresistenze |
8 |
0 |
|
modulo 8 termoresistenze |
8 |
0 |
|
|
|
|
|
Varie: |
|
|
|
modulo 2 contatori / 2 encoder incrementali |
14 |
14 |
|
modulo 4 output relè |
0 |
1 |
|
modulo di misurazione potenza |
0 |
0 |
|
modulo 2 output PWM |
0 |
4 |
|
modulo per comunicazione seriale |
6 |
0 |
|
modulo per lettura 2 celle di carico |
6 |
2 |
|
modulo interfaccia SSI per encoder assoluto |
6 |
6 |
|
Serie SE: |
|
|
|
modulo 4 canali input analogici (I) |
4 |
0 |
|
modulo 4 canali input analogici (V) |
4 |
0 |
|
modulo 4 canali output analogici (I) |
4 |
4 |
|
modulo 4 canali output analogici (V) |
4 |
4 |
|
modulo 4 canali output analogici (V) |
4 |
4 |
|
modulo contatore |
3 |
3 |
|
modulo 16 canali input digitali |
1 |
0 |
|
modulo 16 canali input digitali NPN |
1 |
0 |
|
modulo 16 canali output digitali |
0 |
1 |
|
modulo 16 canali output digitali NPN |
0 |
1 |
|
modulo 2 uscite a relè |
0 |
1 |
|
modulo encoder incrementale |
5 |
1 |
|
modulo master IO-link |
3 |
1 |
|
modulo per comunicazione seriale RS232 |
0 |
0 |
|
modulo per comunicazione seriale RS485 |
0 |
0 |
|
modulo 4 termoresistenze PT100 |
4 |
0 |
|
modulo cover |
0 |
0 |
|
modulo 4 termocoppie / tensioni lineari |
5 |
1 |
|
modulo per motori passo-passo a doppio canale |
0 |
0 |