Introduzione
La configurazione del controllo come nodo slave EtherCAT è disponibile da RTE 34.30.0 solo per controllo RP-2 AS1018.012.
Il controllo, come nodo EtherCAT, permette di scambiare fino a 400 Byte per entrambe le direzioni.
La configurazione dei dati scambiati dal controllo verso il master, visto come nodo EtherCAT, è determinata dal file FBSLAVE.CFGX, presente nella microSD, nella cartella FB_DIR (default /fa).
La configurazione dei dati scambiati è organizzata in 10 blocchi di 40 byte per ognuna delle 2 direzioni, con dati dello stesso tipo; il numero dei dati differenti dipenderà dal loro tipo.
Segnalibri
Argomenti correlati
Configurazione
La configurazione viene effettuata tramite la connessione alle porte ETH FB-S 4 (input) ed ETH FB-S 5 (output).
Il tipo di fieldbus utilizzato si può impostare:
•da configuratore hardware RDE
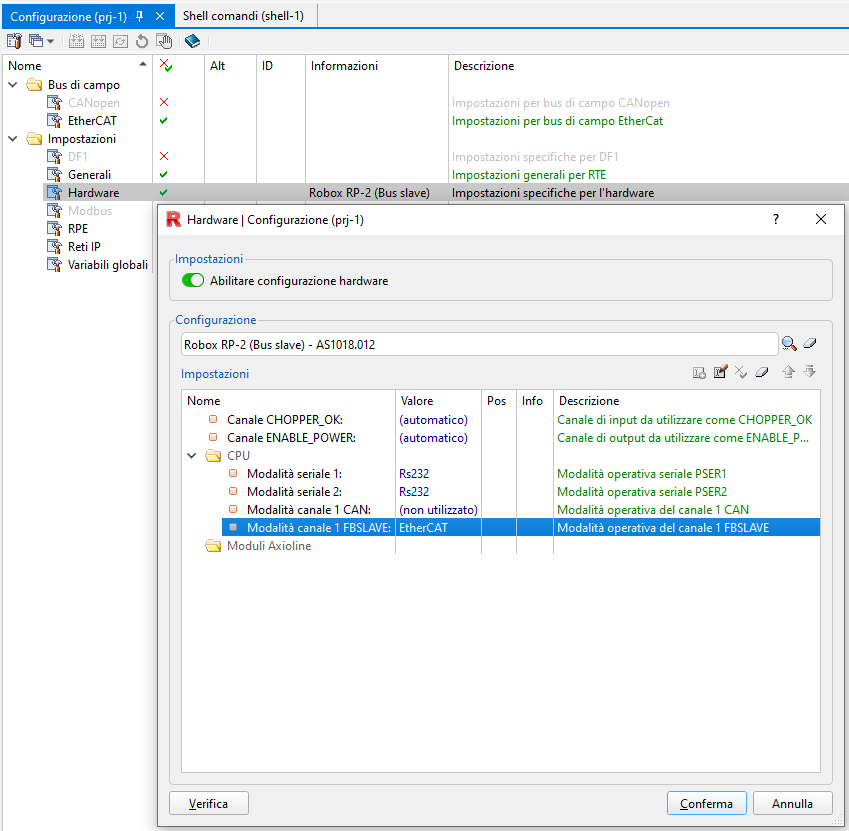
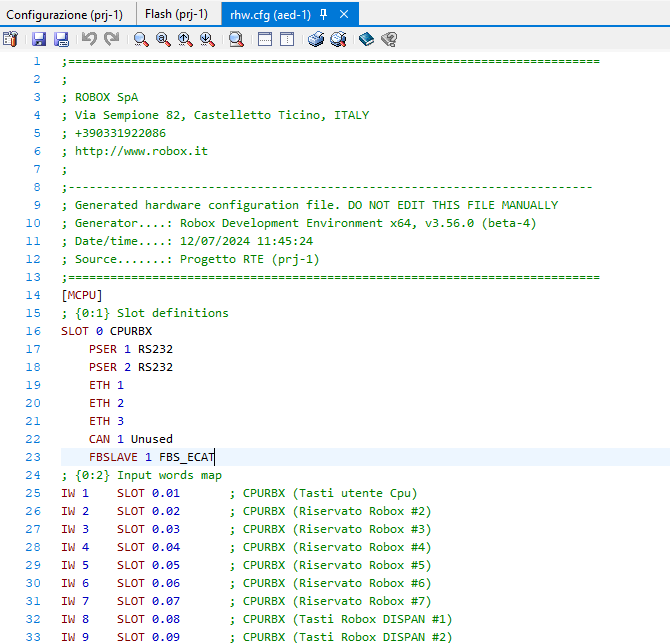
•da file RHW.CFG manualmente
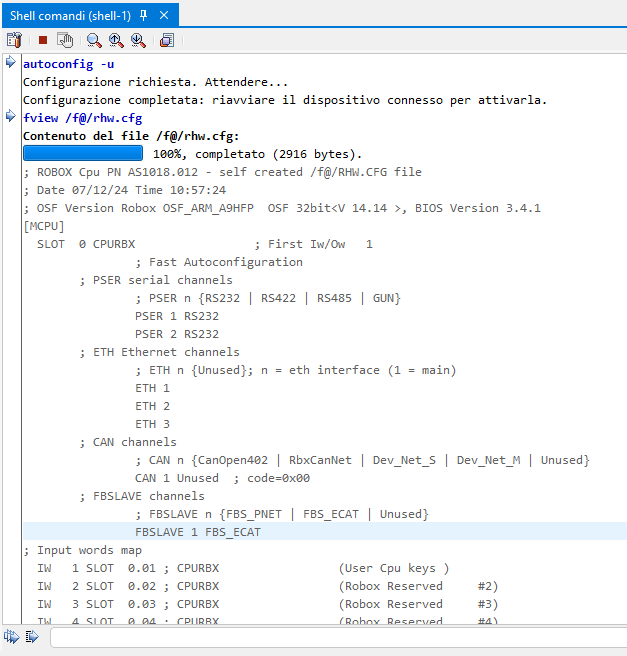
•tramite comando shell autoconfig, specificando l'opzione Update (-U)
Se è la prima volta che il controllore viene configurato come EtherCAT slave, il file del firmware 'Fbs_ecat.eef' deve essere presente nella cartella /f@/ della microSD. Il file viene caricato automaticamente, all'avvio, se l'interfaccia non è già programmata o è programmata con una versione differente.
Nella cartella /fa/ o FB_DIR deve essere presente il file FBSLAVE.CFGX, con la configurazione dei dati scambiati con il master.
File di configurazione FBSLAVE.CFGX
Il file fbslave.cfgx di configurazione del controllo è diviso in 3 parti:
•definizione del tipo di file (xml) e delle caratteristiche generali riguardanti la configurazione
•definizione dei dati ricevuti dal controllo (fieldbus, canale, endian)
•definizione dei dati inviati da controllo (slot, tipo di dato, numero di oggetti)
Configurazione Master
Per la configurazione del nodo sul master viene fornito un file ESI che descrive i dati scambiati disponibili. Il nodo non prevede la possibilità di configurare liberamente i dati scambiati, ma mette a disposizione nei vari slot una configurazione fissa basata sul tipo di dati scambiati, che va correlata a quanto selezionato nel file di configurazione sul controllo per i vari slot. Per ogni slot vengono scambiati un numero di variabili dipendenti dal tipo, considerando un massimo di 40 byte per ogni slot.
I moduli disponibile nel file ESI sono i seguenti:
Nome del modulo |
Tipo di dato |
Numero di dati |
Tipo di blocco in FBSLAVE.CFGX “objType” |
|---|---|---|---|
U16_From_RBX |
Intero senza segno a 16 bit |
10 |
U16 |
I16_From_RBX |
Intero con segno a 16 bit |
10 |
I16 |
U32_From_RBX |
Intero senza segno a 32 bit |
10 |
U32 |
I32_From_RBX |
Intero con segno a 32 bit |
10 |
I32 |
U64_From_RBX |
Intero senza segno a 64 bit |
5 |
U64 |
I64_From_RBX |
Intero con segno a 64 bit |
5 |
I64 |
F32_From_RBX |
Reale 32 bit |
10 |
Float |
F64_From_RBX |
Reale 64 bit |
5 |
Double |
NOTA: Lo slot identificato come Module 21 presente nell'ultimo slot va sempre lasciato configurato, anche se attualmente non è utilizzato per lo scambio dati.
Configurazione rete EtherCAT
In RDE, dopo aver aperto il configuratore EtherCAT, una volta selezionato il file della rete desiderato, selezionare tra gli slave EtherCAT -> Robox S.p.A. -> Robox generic motion controller -> RTE ECAT Slave.
Una volta inserito, nelle impostazioni del dispositivo alla sezione Slots, selezionare i moduli equivalenti a quelli programmati all'interno del controllo nel file FBSLAVE.CFGX.
Effettuata la configurazione dei moduli, nella sezione Dati togliere le eventuali spunte sulle caselle relative ad assegnazione e configurazione dei PDO.
Se il numero degli slot non corrisponde a quelli programmati, per cui la dimensione dei dati scambiata non coincide, in fase di connessione del nodo alla rete, il master genererà un errore nel cambio stato da PRE-OPERATIONAL a SAFE-OPERATIONAL.
NOTA: Se i dati non sono corretti, ma il numero degli slot coincide, non verrà segnalato nessun errore.
In caso di errore nel numero di slot, dando il comando da shell ECAT_PROBE sul controllo Master, si avrà un AL Status = 0x12 (stato PRE_OPERATIONAL + ERRORE); in aggiunta, se l'errore è nel numero di slot verso il nodo (Slot_To_x), il codice di ritorno sarà 0x001d, mentre nel caso di slot dal nodo (Slot_From_x) il codice sarà 0x001e.
Sul controllo Slave uscirà l'allarme 9246 'FBS_ECAT(1) Interface error (5)' e i led segnaleranno la condizione di stato PRE-OPERATIONAL + ERRORE.
Keyword
BAD_CONFIG.13 |
Errore nella configurazione EtherCAT Slave |
FB_SLAVE_CFG.15 |
EtherCAT Slave configurato |
Mostra informazioni sulla configurazione FB_SLAVE in rhw.cfg |
|
Mostra informazioni sulla configurazione FB_SLAVE attuale |
|
Mostra informazioni sulla versione firmware della scheda FB_SLAVE |
|
Mostra informazioni sullo stato della configurazione della scheda FB_SLAVE |
|
FBS_INFO_1[1] |
Tipo di firmware installato sulla scheda |
FBS_INFO_1[2] |
Numero del canale |
FBS_INFO_1[3] |
Stato dell'interfaccia Fieldbus |
FBS_INFO_1[4] |
Stato del firmware dell'interfaccia |
FBS_INFO_1[5] |
Stato del nodo EtherCAT |
FBS_INFO_1[6] |
Numero di messaggi ricevuti da EtherCAT |
FBS_INFO_1[7] |
Numero di messaggi trasmessi a EtherCAT |
FBS_INFO_1[8] |
Numero di Sync ricevuti (SM) |
FBS_INFO_1[9] |
Numero di Sync ricevuti (DC) |
FBS_INFO_1[10] |
Tipo di sincronizzazione |
FBS_INFO_1[11] |
Tempo messaggi ciclici (nanosecondi) |
Tempo di sistema al Sync interrupt (secondi) |
|
TFB all'arrivo del Sync interrupt |
|
TFB all'arrivo del Sync 0 interrupt |
|
Stato della ESM (EtherCAT State Machine) del canale |
|
Tempo del Fieldbus al Sync 0 interrupt (secondi) |
|
Tempo di aggiornamento dati Fieldbus |
Per altre keyword EtherCAT vedi Comunicazione EtherCAT (COE).
Allarmi
FBS_ECATS(ch) configuration fault (code) |
|
FBS_ECATS(ch) lost communication (code) |
|
FBS_ECATS(ch) interface error (code) |