Introduzione
Permette l'interfacciamento del motion controller tipicamente ad un PLC in una rete DeviceNet.
NOTA: Se utilizzato per la comunicazione DeviceNet, il controller non può essere utilizzato anche come master canOpen o canbus intermodulo (RBXCNET).
Il sistema Robox può gestire fino a 32 dispositivi con scambio massimo di dati di 64 byte per ogni dispositivo (al più 32 byte in lettura e 32 in scrittura) e un massimo di 512 byte per tutti i dispositivi della rete.
È possibile comunicare con i controlli Robox in modalità DeviceNet come segue:
•Nei controlli RBXM utilizzando la scheda di comunicazione CAN/PROF INT (AS5034.010)
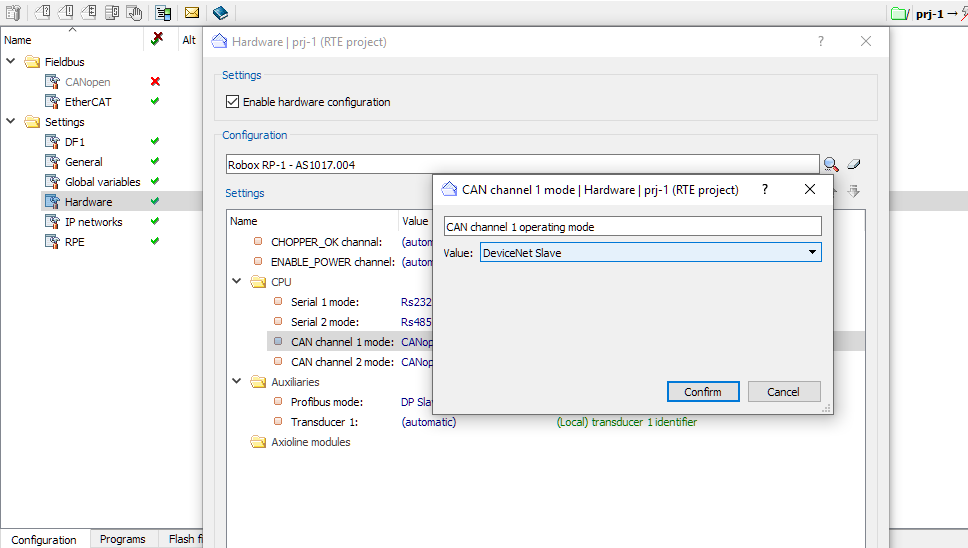
•Nei controlli uRmc2/uRmc3/RP1/RP2 tale comunicazione può essere fatta utilizzando uno dei due canali CAN disponibili
Il controllo Robox apparirà come una periferica di tipo MASTER o SLAVE all'interno del protocollo DeviceNet.
Segnalibri
Funzionamento slave
Per configurare il controllo Robox come slave DeviceNet bisogna caricare in flash il file DNSn.CFG (n è l'indice della scheda (0 -:- 7)). Il file deve risiedere su flash nelle directory CAN_DIR oppure FB_DIR. Il controllo Robox apparirà come una periferica di tipo slave all'interno del protocollo DeviceNet.
La struttura dei dati all'interno del singolo blocco deve essere definita (sul controllo Robox) nel file DNSn.CFG.
L'interscambio dei dati avviene mediante l'utilizzo di fino a 2 blocchi in lettura e fino a 2 blocchi in scrittura.
La lunghezza massima del singolo blocco è di 200 byte.
Le entità definibili in un blocco in scrittura (dall'esterno verso Robox) sono le seguenti:
•Registri interi prefissati
•Registri reali prefissati (in formato FLOAT o DOUBLE)
•Registri stringa
•Semafori di scrittura (sia di dimensione interi che float e double)
•Zone riservate
Le entità definibili in un blocco in lettura (da Robox verso l'esterno) sono le seguenti:
•Registri interi prefissati
•Registri reali prefissati (in formato FLOAT * o DOUBLE)
•Registri stringa
•Input word
•Output word
•Zone riservate
NOTA: Il master legge e scrive sul canale CAN.INT alla sua frequenza di lavoro. Il controllo fornirà i dati alla frequenza di esecuzione delle rule.
NOTA: Si ricorda che il formato dei numeri float è di 4 byte (1 di esponente e 3 di mantissa). Il formato dei numeri real trattati dal linguaggio R3 è di 8 byte (2 di esponente e 6 di mantissa). Se, nella trasformazione dei registri DOUBLE in FLOAT, il contenuto dei registri è maggiore del massimo numerico rappresentabile in float, viene assunto questo limite come valore (con il giusto segno) (il valore è 3.40282e38) (vedi IEEE standard 854).
NOTA: Nel caso in cui sia attivo warm_rst.8, tutte le comunicazioni DeviceNet slave sono disabilitate. DeviceNet master continua invece a funzionare normalmente.
Argomenti correlati slave
Configurazione slave per controlli RBXM
Per abilitare questa comunicazione è necessario avere la scheda di comunicazione Robox CAN. INT e devono essere presenti su device flash di sistema i seguenti files:
PFLMvvrr.O86 |
Loader per cpu CAN. vvrr sono le 4 cifre di versione e revisione |
DNESvvrr.O86 |
Esecutore per comunicazione DeviceNet slave. vvrr sono le 4 cifre di versione e revisione |
File di definizione struttura blocchi interscambiati relativa alla scheda “ennesima" presente nel cesto. n è indice delle scheda CAN.INT. interessata; l'indice 0 è relativo alla prima scheda CAN nel cesto a partire da sinistra, indipendentemente dalla posizione all'interno del cesto stesso |
Trovando all'accensione, una scheda CAN/PROF.INT (AS5034.010) configurata DeviceNet slave, RTE cerca di caricare i relativi software di gestione PFLMvvrr.O86 e DNESvvrr.O86 all'interno della directory SYS_DIR.
In caso di assenza o errore durante il caricamento di uno dei due file viene generato l'allarme 9202.
Configurazione slave per controlli uRMC2, uRMC3, RP0, RP1, RP2
Per abilitare questa comunicazione è necessario definire nel file RHW.cfg l'utilizzo DeviceNet del canale.
Inoltre deve essere presente su device flash di sistema (directory CAN_DIR oppure FB_DIR) il seguente file:
File di definizione struttura blocchi interscambiati relativa al canale CAN n+1 (es. DNS0.CFG è il file di configurazione del canale CAN 1). |
Se durante l'analisi viene riscontrata un'anomalia si genera un allarme (vedi allarmi DeviceNet) e si ha segnalazione nel report.
Dopo aver eseguito le rule viene gestito effettivamente lo scambio dati con la seguente struttura:
•Lettura area diagnostica da scheda CAN.INT e copia dei dati, se specificato, nei registri interi
•Verifica che la scheda CAN.INT sia operativa, altrimenti si genera l'allarme 9203
•Aggiornamento dei dati alla scheda CAN.INT (solo se i dati precedentemente scritti da CPU RBX sono stati assunti da CAN.INT) (RBX --> DN)
•Aggiornamento dei dati dalla scheda CAN.INT se sono state ricevute nuove informazioni (DN-->RBX). I dati sono riconosciuti considerando i possibili semafori
Funzionamento master
Da RTE 34.27.5 è stata aggiunta la gestione della comunicazione DeviceNet Master su controlli con canale/i CAN integrato.
Per configurare il controllo Robox come master DeviceNet bisogna caricare in flash il file DNMSTn.cfg (n è l'indice della scheda 0 o 1). Il file deve risiedere su flash nelle directory CAN_DIR oppure FB_DIR. Il controllo Robox apparirà come una periferica di tipo master all'interno del protocollo DeviceNet.
La struttura dei dati all'interno del singolo blocco deve essere definita (sul controllo Robox) nel file DNMSTn.cfg.
Le entità definibili in un blocco in scrittura (dall'esterno verso Robox) e in lettura (da Robox verso l'esterno) sono le seguenti:
•Registri interi prefissati
•Registri reali prefissati (in formato FLOAT o DOUBLE)
•Zone riservate
Argomenti correlati master
Configurazione master per controlli uRMC2, uRMC3, RP0, RP1, RP2
Per abilitare questa comunicazione è necessario definire manualmente nel file RHW.cfg l'utilizzo DeviceNet come modalità operativa della porta CAN, inserendo la keyword "Dev_Net_M". Ad esempio se si vuole utilizzare la porta 1 si deve scrivere:
; ... [MCPU] ; {0:1} Slot definitions SLOT 0 CPURBX PSER 1 RS232 PSER 2 RS232 ETH 1 ETH 2 ETH 3 CAN 1 Dev_Net_M ; ... |
Inoltre deve essere presente su device flash di sistema (directory CAN_DIR oppure FB_DIR) il seguente file:
File di definizione struttura blocchi interscambiati relativa al canale CAN n+1 (es. DNMST0.CFG è il file di configurazione del canale CAN 1). |
Se durante l'analisi viene riscontrata un'anomalia si genera un allarme (vedi allarmi DeviceNet) e si ha segnalazione nel report.
Dopo aver eseguito le rule viene gestito effettivamente lo scambio dati con la seguente struttura:
•Lettura area diagnostica da scheda CAN.INT e copia dei dati, se specificato, nei registri interi
•Verifica che la scheda CAN.INT sia operativa, altrimenti si genera l'allarme 9203
•Aggiornamento dei dati alla scheda CAN.INT (solo se i dati precedentemente scritti da CPU RBX sono stati assunti da CAN.INT) (RBX --> DN)
•Aggiornamento dei dati dalla scheda CAN.INT se sono state ricevute nuove informazioni (DN-->RBX)
Nota: per alcuni controlli si potrebbe anche comunicare senza obbligo di inserire task e rule. In questo modo, ad esempio su RP-2, ovviamente non si comunicherebbe più in modalità esecuzione ma in modalità programmazione.
Allarmi DeviceNET
|
|
Keywords DeviceNET
sys_flag.20 (0x100000) |
Abilita immissione nel report di informazioni riguardanti la comunicazione |
|
|
sys_flag_2.3 (0x0008) |
Abilita immissione nel report di informazioni riguardanti la configurazione del DeviceNet Master |
sys_flag_2.4 (0x0010) |
Abilita immissione nel report di informazioni riguardanti l'invio di messaggi DeviceNet (per il tempo di SYS_COUNT) |
sys_flag_2.5 (0x0020) |
Abilita immissione nel report di informazioni riguardanti la ricezione di messaggi DeviceNet (per il tempo di SYS_COUNT) |
sys_flag_2.6 (0x0040) |
Disabilita la generazione dell'allarme 9241 |
sys_flag_2.7 (0x0080) |
Disabilita la generazione dell'allarme 9242 |
sys_flag_2.8 (0x0100) |
Disabilita la generazione dell'allarme 9243 |
sys_flag_2.9 (0x0200) |
Disabilita la generazione dell'allarme 9203 |
|
|
Maschera dei canali fieldbus master configurati |
|
Maschera dei canali fieldbus slave configurati |