To manage Phase drives connected in EtherCAT in advanced mode, it is necessary to properly configure the transducer and actuator of the axis in question through the project configurator.
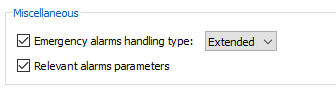
Also, in the settings--> general--> tab alarms, the two options must be checked as shown below.
If the drive is AXM type, it is necessary to load the PLC application named "AxM2 ROBOX" on board the Drive.
If the Drive is TW type this performance is not yet available.
The advanced mode allows you to:
•Manage different types of homing (MVA_ZC). Typical example is the quota picture on micro or micro search with subsequent search of the motor position within the lap or at mechanical limit switch with torque reduction etc...
•Use from application capture instruction POS_CAPTURE_CMD to perform Quota Photo
•Extended diagnostic in report (verbose) of the emergency messages (if enabled) and dedicated alarming 675-:-679; 2200-:-2203
•On AxM it is possible to impose torque reduction in permillesimals by writing in object 0x2A06:0 (values between 0 and 1000)
The operations to be performed are:
Select from project configurator--> axes--> tab transducer:
•Transducer type: EtherCAT Coe (configuration of an absolute transducer)
•Drive type: select the drive model used
•Auxiliary parameter 1: represents the digital input channel where the homing micro is physically wired. In case a digital input not on board the drive is to be used, the channel number must be specified in the "zero micro index" parameter. In that case it will not be possible to configure the execution of "full precision" zero cycles
NOTE: If you intend to use the digital input on the drive, do not specify any index in the "zero micro index" parameter. Then leave it set to default.
Transducer type |
Value |
Description |
|---|---|---|
EtherCAT - (type AXM) |
0 |
Homing micro not allowed |
1 |
in0 on drive |
|
2 |
in1 on drive |
|
3 |
in2 on drive |
|
4 |
in3 on drive |
|
EtherCAT - (type Ultract TW) NOTE: Not yet implemented. |
0 |
Homing micro not allowed |
1 |
in0 on drive |
If it is used instead the POS_CAPTURE_CMD instruction to execute the quota latch, the micro parameter should be set as follows:
Transducer type |
Value |
Description |
|---|---|---|
EtherCAT - (type AXM) |
0 |
Indicates full precision photo (valid only if resolver transducer) |
1 |
in0 on drive |
|
2 |
in1 on drive |
|
3 |
in2 on drive |
|
4 |
in3 on drive |
|
EtherCAT - (type Ultract TW) NOTE: Not yet implemented. |
0 |
Homing micro not allowed |
1 |
in0 on drive |
NOTE: Instruction is also valid in case of CANOpen connection.
Select from project configurator--> axes--> tab actuator:
•Actuator type: EtherCAT Coe
•Drive type: the drive model used and the station within the node
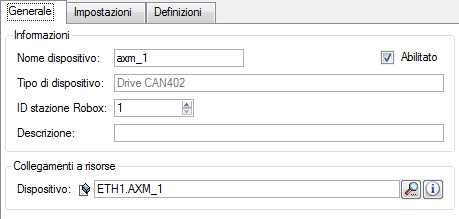
Associate a remote device of type "drive can402" to the axis just configured. This operation allows you to:
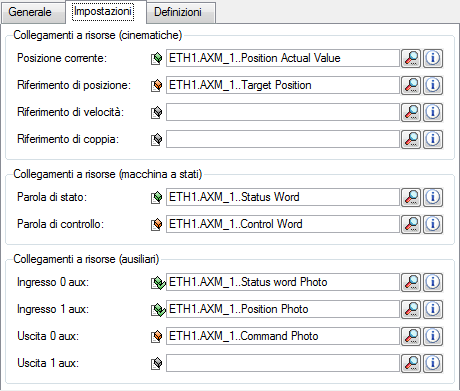
•Associate the drive (device), selected from the list of hardware resources connected to the network (links to resources), to the Robox station ID of the desired axis, status information to status word, command information to control word
•Associate real quota information to CP, auxiliary information for quota photos
By associating the EtherCAT terminal (drive) with a remote CAN402 device, it is possible:
•Synchronous communication via PDO, in accordance with the XML file
•Asynchronous communication by SDO from program with the appropriate functions or from shell with the appropriate commands (see COE)
•Management of the DS402 state machine by RTE in accordance with the POWER SET configuration
•Automatic diagnostic by RTE about operational status and emergency messages with axis alarm handling
NOTE: An example is available in the default projects of RDE.