Il ciclo di preset viene eseguito alla prima messa in servizio della macchina e successivamente a seguito di una richiesta dell'operatore.
Tali macchine tipicamente sono equipaggiate di trasduttori assoluti multiturn.
Capita a volte anche la necessità di voler gestire la ritentività delle quote anche su macchine non equipaggiate di traduttori assoluti, ad esempio perché impossibilitate al movimento se non a quadro acceso o equipaggiate di freni di stazionamento o altro.
La configurazione del trasduttore deve essere così fatta:
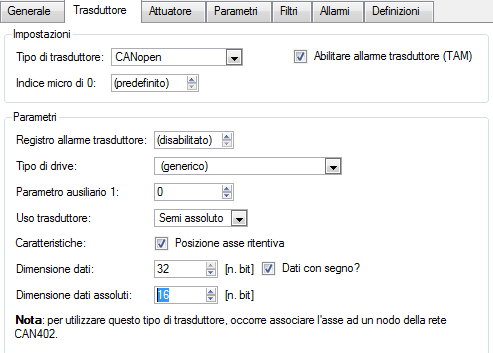
Tipo di trasduttore
La scelta tra CANOpen, EtherCAT (CoE), EtherCAT (SoE) viene effettuata in funzione al tipo di fieldbus utilizzato.
Indice micro di zero
Se il drive utilizzato NON compare nella lista di selezione tipo di drive occorre specificare qui l’indirizzo del canale di input digitale dove fisicamente viene cablato il micro o prox per effettuare l’azzeramento dell’asse.
Potrà essere utilizzata l’istruzione MVA_ZC ma non sarà possibile programmare la full precision.
NOTA: L'istruzione POS_CAPTURE_CMD non viene gestita.
Se il drive è presente nella tendina di selezione tipo di drive è possibile:
•Specificare l'input dove è fisicamente cablato il micro o il prox
•Lasciare (predefinito) e indicare nel parametro ausiliario 1 relativo al tipo di drive dove viene cablato l'input sul drive
Potrà essere utilizzata l'istruzione MVA_ZC con anche la programmazione della full precision.
NOTA: L'istruzione POS_CAPTURE_CMD viene gestita.
Per avere la gestione della quota ritentiva è necessario mettere il FLAG su posizione asse ritentiva e specificare le caratteristiche dell'informazione di quota in arrivo a RTE.
Questa informazione dipende ovviamente dal tipo di trasduttore e dall'eventuale elaborazione eseguita dal drive.
Esempi di uso del trasduttore:
Trasduttore |
Uso del trasduttore |
dati dimensione |
dati assoluti |
|---|---|---|---|
Encoder |
incrementale |
32 |
- |
Encoder |
semi assoluto |
32 |
0 |
Resolver 12 Bit |
semi assoluto |
32 |
12 |
Resolver 16 Bit |
semi assoluto |
32 |
16 |
Endat eqi1130 |
semi assoluto |
32 |
30 |
Trasd_27 |
semi assoluto |
32 |
32 |
Trasd_27 |
assoluto |
32 |
- |
NOTA: Si noti l'equivalenza tra uso del trasduttore (encoder) configurato incrementale o semi assoluto (32, 0).
NOTA: Si noti altresì l'equivalenza tra uso del trasduttore (Trasd_27) configurato assoluto o semi assoluto (32, 32).
RTE, avendo a disposizione le sopracitate informazioni, effettua le seguenti gestioni:
•La variabile predefinita c0_done diventa ritentiva
•Viene gestito lo scaravolto dell'informazione in arrivo dal trasduttore
•Salva la quota dell'asse allo spegnimento e la reimposta, eventualmente modificata, al successivo riavvio
•Esegue all'accensione un controllo sulla posizione letta e la posizione salvata
•Gestisce l'offset tra le quote assolute del mondo drive e del mondo controllo
come segue:
All'accensione RTE, se c0_done vero e FLAG ritentività quote attivo, impone la quota reale memorizzata allo spegnimento, modificata della variazione rilevata tra la RAWCP memorizza allo spegnimento e quella rilevata all'accensione.
NOTA: Da RTE 34.11.6 anche in caso di C0_DONE = 0 vengono imposte le quote ritentive. Tramite il SYS_CFG.3 è possibile evitare tale gestione.
Qualora il valore assoluto della variazione sia maggiore del parametro MAX_D_RAW viene generato l'allarme: "40#nAx Retentive Transducer : max movem. Exceeed.
Il parametro MAX_D_RAW di default è pari ad un quarto del numero di bit della componente assoluta.
Di quanto la quota può variare mentre RTE è spento?
Dipende ovviamente da quanti bit è l'informazione assoluta del trasduttore.
Se viene utilizzato un resolver a due poli che rende la posizione assoluta dell'albero motore nel giro a 12 bit allora l'albero motore potrà muoversi al massimo un quarto di giro in senso orario e di un quarto di giro in senso antiorario prima della generazione dell'allarme 40.
NOTA: RTE non potrà mai accorgersi dei movimenti che superano ciò che la parte di dati assoluti può rappresentare. Tale controllo viene effettuato da RTE nei limiti delle informazioni date dal trasduttore!
Uguale controllo viene fatto ad esempio nel caso di trasduttore assoluto multiturn da 30 bit di parte assoluta. In questo caso la soglia MAX_D_RAW viene inizializzata a 2^28 bit (1/4 della dimensione dei dati assoluti).
Ovvio altresì che nel caso di trasduttori assoluti multiturn, avendo i dati assoluti un maggior numero di bit, il parametro MAX_D_RAW è molto più grande e quindi molto più grande sarà lo spostamento consentito degli assi a controllo fermo.
Se viene usato ad esempio un trasduttore multiturn con 30 bit di dati assoluti (18 nel giro e 12 di giri) il numero di giri effettuabili a controllo spento prima di generare l'allarme 40 sarà di (2^30/2^18)/4 = 1024.
La variabile MAX_D_RAW può comunque essere inizializzata dall'utente al valore desiderato.
Da parte del software applicativo dovrà essere gestito in accordo con la variabile predefinita C0_DONE la gestione dell'esecuzione o meno del ciclo di home.
Registro allarme trasduttore
Disabilitato (comunque indifferente).