Situazione
Si vuole, in caso di allarme o in caso di mancanza di un feedback del Power Set o di un asse appartenente ad esso, inviare il comando di quick_stop, conforme alla macchina a stati DS402, ai drive via fieldbus. In questo caso i drive effettueranno per loro conto una rampa di stop.
NOTA: L'asse in allarme potrebbe non essere in grado di poter effettuare tale rampa (es: rottura stadio di potenza, ...).
Operazioni da eseguire:
1) |
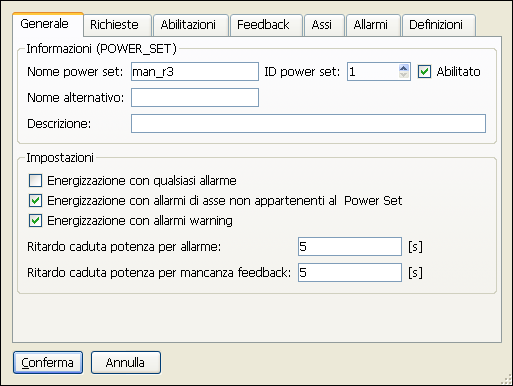
Nel configuratore grafico del power set impostare un tempo di ritardo.
|
|
NOTA: Tale tempo deve essere appena superiore alla rampa di arresto. |
2) |
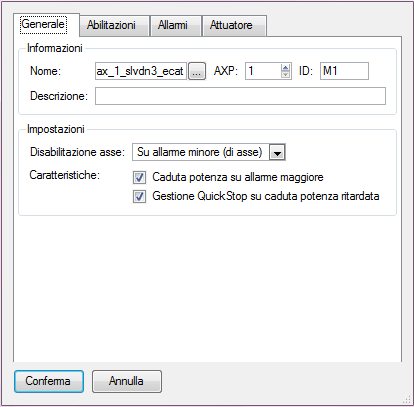
Da configuratore grafico selezionare per l'asse la richiesta di quick stop.
|
3) |
Da programma R3/LD utilizzare la keyword QUICK_STOP_SO per sapere la maschera degli assi con in corso un quick stop. Utilizzare, per sapere che il conteggio è in corso, la funzione PS_STATUS o la keyword SWITCHING_OFF. |
|
NOTA: La funzione QUICK STOP non ha validità se non si specifica un tempo di ritardo di caduta di potenza (allarme o feedback). |
|
NOTA: Durante la fase di QUICK STOP gli eventuali allarmi di inseguimento SAM, di velocità SPAM e accelerazione ACAM degli assi sono disattivati. |
|
NOTA: Genera nel file RTE.CFG la keyword QUICKSTOP_ON_DELAYED_POFF. |
Esempio
I32 power_sts, systemPowered, powerGoingDown power_sts = ps_status(power)
systemPowered = ((power_sts r_and 0x12) = 0x12) powerGoingDown = (power_sts r_and 0xC0) |