Per gestire in modalità avanzata i drive SPIMD20 collegati in EtherCAT è necessario configurare opportunamente il trasduttore e l'attuatore dell'asse in questione attraverso il configuratore di progetto.
Il drive SPIMD20 viene montato sui motori con drive integrato RMD e sugli azionamenti nearby RID20.
La modalità avanzata permette di:
•Gestire diversi tipi di homing (MVA_ZC). Esempio tipico è la foto di quota su micro o la ricerca del micro con successiva ricerca della posizione del motore all'interno del giro oppure a finecorsa meccanico con riduzione di coppia
•Utilizzare da applicativo l'istruzione capture POS_CAPTURE_CMD
•Diagnostica estesa nel report (verbosa) dei messaggi di emergency (se abilitata) e allarmistica dedicata 729 -:- 799
Le operazioni da eseguire sono:
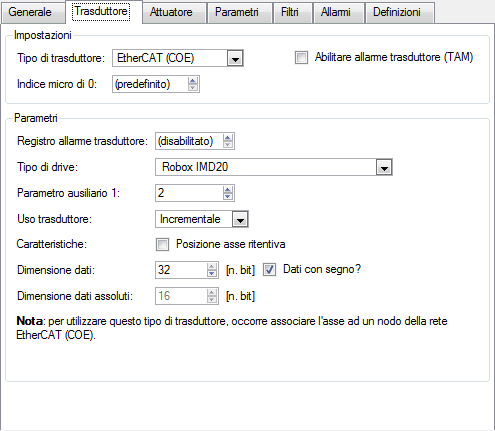
Selezionare da configuratore di progetto -->assi-->tab trasduttore:
•Tipo trasduttore: EtherCAT Coe (configurazione di un trasduttore assoluto)
•Indice micro di 0: se specificato indica il canale digitale di input dove viene cablato fisicamente il micro di homing. Se predefinito viene utilizzato il canale specificato in "Parametro ausiliario 1"
•Tipo di drive: Selezionare Robox IMD20
•Parametro ausiliario 1: Rappresenta il canale digitale di input dove fisicamente viene cablato il micro di homing (ovviamente il campo "indice micro di 0" deve essere predefinito). 1 indica il primo canale di ingresso digitale, 2 indica il secondo canale di ingresso digitale.
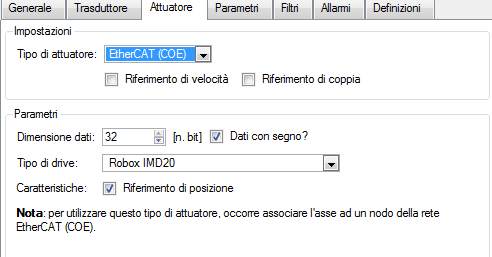
Selezionare da configuratore di progetto -->assi-->tab attuatore:
•Tipo attuatore: EtherCAT Coe
•Tipo di drive: Selezionare Robox IMD20
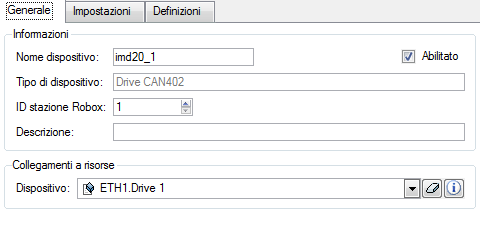
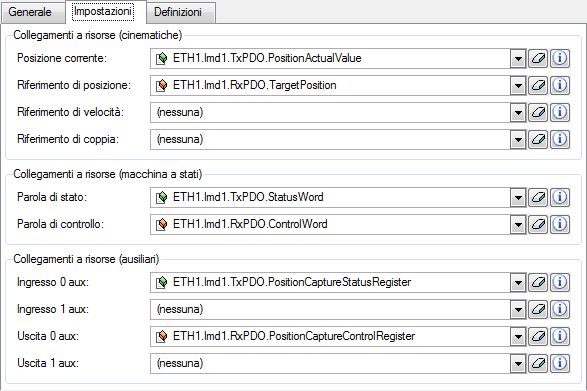
Associare un dispositivo remoto, di tipo "drive can402" all'asse appena configurato. Tale operazione permette di:
•Associare il drive (device), selezionato dall'elenco delle risorse hardware collegate alla rete (links to resources), alla Robox station ID dell'asse desiderato
•Associare l'informazione di quota reale alla CP, l'informazione di stato alla status word, l'informazione di comando alla control word e le informazioni accessorie per le foto di quota
Associando il terminale EtherCAT (drive) ad un dispositivo remoto di tipo CAN402 è possibile:
•Comunicazione sincrona mediante PDO, in accordo con il file XML
•Comunicazione asincrona mediante SDO da programma con le apposite funzioni o da shell con gli appositi comandi (vedi COE)
•Gestione della macchina a stati DS402 da parte di RTE in accordo alla configurazione del POWER SET
•Diagnostica automatica da parte di RTE circa lo stato operativo e i messaggi di emergency con gestione degli allarmi di asse e dedicati
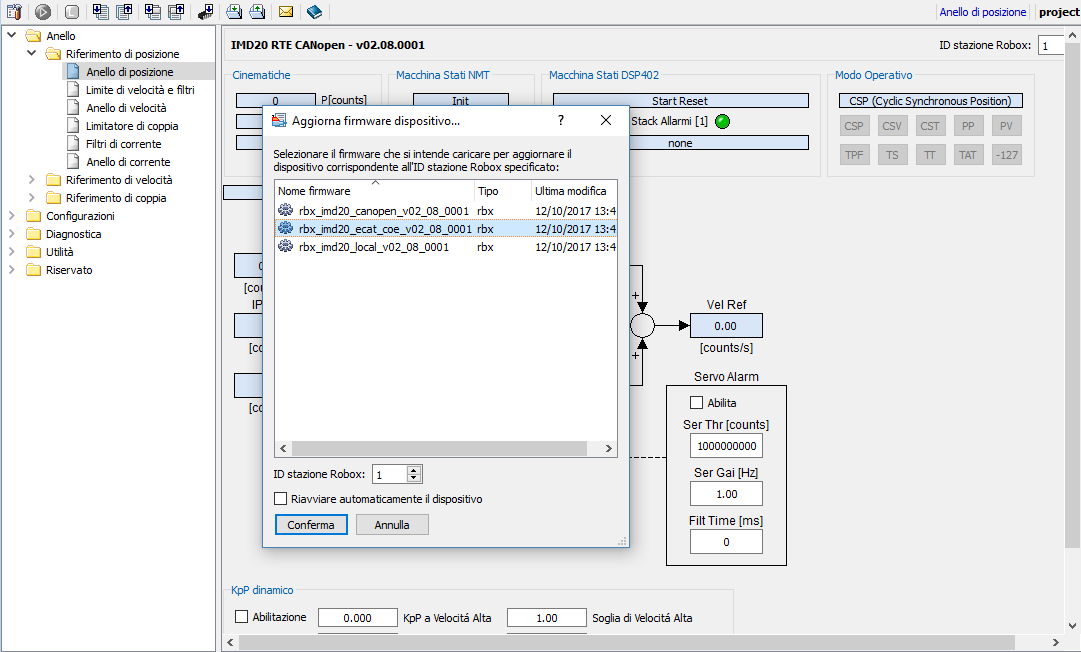
Caricamento del firmware da RDE3
Da RDE 3.11.1 è possibile aggiornare il firmware del drive SPIMD20 tramite lo strumento IMD CONFIGURATOR.
L'operazione è possibile sia in collegamento seriale PC-->IMD20 sia utilizzando il uRmc2 o 3 come "ponte".
In questo caso dopo aver selezionato la WS sulla quale eseguire l'operazione selezionare aggiorna firmware dispositivo dal menù strumenti della toolbar principale.