Per gestire in modalità avanzata i drive Sinamics collegati in EtherCAT è necessario equipaggiare la CU320 con la scheda RCB (Robox Control Board AS3031.xxx).
Dall'unica interfaccia RCB è possibile gestire fino a 6 drive assegnado ad ognuno il proprio R.ID.
RTE si prende cura, utilizzando l'informazione del drive usato, di normalizzare l'accesso da parte dell'utente alle informazioni come se fossero tutte nel range di un solo drive (0x3000 -:- 0x37FF e 0x6000 -:- 0x67FF).
RTE tiene conto anche dell'informazione di quale drive genera emergency al fine di emettere la corrispondente diagnostica solo all'asse interessato.
RTE aggiunge il nome proprio del drive all'interno della descrizione dell'emergency inserita nel report, nome letto dal drive stesso.
La modalità avanzata permette di:
•Gestire diversi tipi di homing (MVA_ZC). Esempio tipico è la foto di quota su micro o la ricerca del micro con successiva ricerca della posizione del motore all'interno del giro oppure a finecorsa meccanico con riduzione di coppia
•Utilizzare da applicativo l'istruzione capture pos_capture_cmd
•Diagnostica estesa nel report (verbosa) dei messaggi di emergency (se abilitata)
•Gestione del secondo, terzo, quarto, quinto e sesto asse (ad un nodo EtherCAT possono essere connessi fino a sei drive)
Operazioni da eseguire
Selezionare da configuratore di progetto -->assi-->tab trasduttore:
•Tipo trasduttore: EtherCAT Coe (configurazione di un trasduttore assoluto)
•Tipo di drive: il modello di drive utilizzato e la stazione all'interno del nodo
•Parametro ausiliario 1: Rappresenta il canale digitale in input dove fisicamente viene cablato il micro di homing o capture
0 |
Foto solo su CH0 |
1-:-22 |
Foto su input specificato (si ricorda che gli input che possono effettuare foto hw sono : 10 -:- 16 ) |
Selezionare da configuratore di progetto -->assi-->tab attuatore:
•Tipo attuatore: EtherCAT Coe
•Tipo di drive: il modello di drive utilizzato e la stazione all'interno del nodo
Associare un dispositivo remoto, di tipo "drive can402" all'asse appena configurato. Tale operazione permette di:
•Associare il drive (device), selezionato dall'elenco delle risorse hardware collegate alla rete (links to resources), alla Robox station ID dell'asse desiderato. Utilizzare RFBCED per la generazione del file di rete
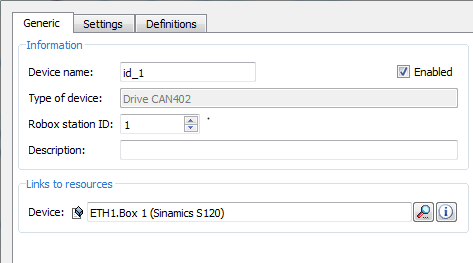
•Associare l'informazione di quota reale alla CP, l'informazione di stato alla status word, l'informazione di comando alla control word e le informazioni accessorie per le foto di quota
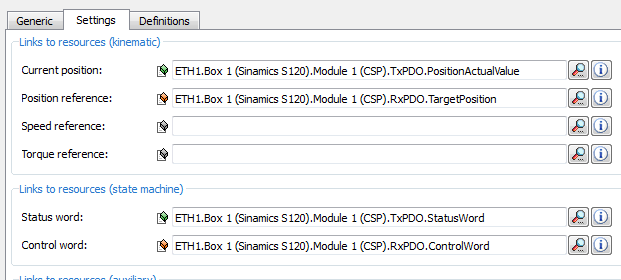
Associando il terminale EtherCAT (drive) a un dispositivo remoto di tipo CAN402 è possibile:
•La comunicazione sincrona mediante PDO, in accordo con il file XML
•La comunicazione asincrona mediante SDO da programma con le apposite funzioni o da shell con gli appositi comandi (vedi COE)
•Gestione della macchina a stati DS402 da parte di RTE in accordo alla configurazione del POWER SET
•Diagnostica automatica da parte di RTE circa lo stato operativo e i messaggi di emergency con gestione degli allarmi di asse e dedicati
Tabella indirizzamento oggetti in gestione multidrive
Gli oggetti compresi tra 0x1000 e 0x27ff sono generici per la scheda RCB quindi vengono accesi indipendentemente dal drive (R.ID) utilizzato.
Gli altri oggetti sono invece organizzati per drive. Ad esempio gli oggetti compresi tra 0x6000 e 0x67ff sono informazioni relative al primo drive.
Lo stesso set di informazione è disponibile per l'asse 2 usando gli oggetti compresi tra 0x6800 e 0x6FFF e così via.
Oggetti |
RCB (@) |
all axis (*) |
1st Ch (@) |
2st Ch (@) |
3st Ch (@) |
4st Ch (@) |
5st Ch (@) |
6st Ch (@) |
|---|---|---|---|---|---|---|---|---|
1000 -:- 1FFF |
x |
- |
- |
- |
- |
- |
- |
- |
2000 -:- 2FFF |
x |
x |
- |
- |
- |
- |
- |
- |
3000 -:- 37FF |
- |
x |
x |
- |
- |
- |
- |
- |
3800 -:- 3FFF |
- |
- |
- |
x |
- |
- |
- |
- |
4000 -:- 47FF |
- |
- |
- |
- |
x |
- |
- |
- |
4800 -:- 4FFF |
- |
- |
- |
- |
- |
x |
- |
- |
5000 -:- 57FF |
- |
- |
- |
- |
- |
- |
x |
- |
5800 -:- 5FFF |
- |
- |
- |
- |
- |
- |
- |
x |
6000 -:- 67FF |
- |
x |
x |
- |
- |
- |
- |
- |
6800 -:- 6FFF |
- |
- |
- |
x |
- |
- |
- |
- |
7000 -:- 77FF |
- |
- |
- |
- |
x |
- |
- |
- |
7800 -:- 7FFF |
- |
- |
- |
- |
- |
x |
- |
- |
8000 -:- 87FF |
- |
- |
- |
- |
- |
- |
x |
- |
8800 -:- 8FFF |
- |
- |
- |
- |
- |
- |
- |
x |
NOTA (@): Stesso oggetto per tutti i sei drive, ovvero indipendentemente dal R.ID usato per accedere il dato sarà fisicamente sempre lo stesso.
NOTA (*): Valida se assi configurati come dispositivi "Sinamics(RCB) drive" da 1 a 6.
Assumendo di avere una configurazione del tipo:
asse 1 (RID 1) primo drive
asse 3 (RID 3) secondo drive
asse 2 (RID 2) terzo drive
Leggendo l'oggetto 0x1000:0 su RID 1, 2 o 3 il risultato è identico in quanto si accede allo stesso oggetto.
Leggendo l'oggetto 0x3000:2 del RID 1 si leggerà il nome del primo drive (asse 1) (RTE accederà ad oggetto 3000:2).
leggendo l'oggetto 0x3000:2 del RID 2 si leggerà il nome del terzo drive (asse 2) (RTE accederà ad oggetto 4000:2).
leggendo l'oggetto 0x3000:2 del RID 3 si leggerà il nome del secondo drive (asse 3)(RTE accederà ad oggetto 3800:2).
Leggendo l'oggetto 0x3800:2 del RID 1, 2 o 3 si leggerà sempre il nome del secondo drive!