Per gestire in modalità avanzata i drive Phase collegati in EtherCAT è necessario configurare opportunamente il trasduttore e l'attuatore dell'asse in questione attraverso il configuratore di progetto.
Inoltre nel menù impostazioni-->generali-->TAB allarmi devono essere spuntate le due opzioni come sotto indicato.
Se drive è di tipo AXM è necessario caricare l'applicazione PLC denominata "AxM2 ROBOX" a bordo del Drive.
Se il drive è di tipo TW tale prestazione non è ancora disponibile.
La modalità avanzata permette di:
•Gestire diversi tipi di homing (MVA_ZC). Esempio tipico e la foto di quota su micro o la ricerca del micro con successiva ricerca della posizione del motore all'interno del giro oppure a finecorsa meccanico con riduzione di coppia etc...
•Utilizzare da applicativo l'istruzione capture POS_CAPTURE_CMD per eseguire Foto di quota
•Diagnostica estesa nel report (verbosa) dei messaggi di emergency (se abilitata) ed allarmistica dedicata 675 -:-679 ; 2200 -:- 2203
•Su AxM è possibile imporre la riduzione di coppia in permillesimi scrivendo nell'oggetto 0x2A06:0 (valori tra 0 e 1000)
Le operazioni da eseguire sono:
Selezionare da configuratore di progetto -->assi-->tab trasduttore:
•Tipo trasduttore: EtherCAT Coe (configurazione di un trasduttore assoluto)
•Tipo di drive: Selezionare il modello di drive utilizzato
•Parametro ausiliario 1: Rappresenta il canale digitale in input dove fisicamente viene cablato il micro di homing. Nel caso si voglia utilizzare un ingresso digitale non a bordo del drive il numero del canale deve essere specificato nel parametro "indice micro di zero". In tal caso non sarà possibile configurare l'esecuzione dei cicli di zero "Full precision".
NOTA: Se si intende utilizzare l'ingresso digitale sul drive non specificare nessun indice nel parametro "indice micro di zero". Lasciarlo quindi impostato su predefinito.
Tipo di trasduttore |
Valore |
Descrizione |
|---|---|---|
EtherCAT - (tipo AXM) |
0 |
micro di 0 non permesso |
1 |
in0 su drive |
|
2 |
in1 su drive |
|
3 |
in2 su drive |
|
4 |
in3 su drive |
|
EtherCAT - (tipo Ultract TW) NOTA: Non ancora implementato. |
0 |
micro di 0 non permesso |
1 |
in0 su drive |
Se si utilizza invece l'istruzione POS_CAPTURE_CMD per eseguire il latch di quota, il parametro micro va impostato come segue:
Tipo di trasduttore |
Valore |
Descrizione |
|---|---|---|
EtherCAT - (tipo AXM) |
0 |
indica foto full precision (valido solo se traduttore resolver) |
1 |
in0 su drive |
|
2 |
in1 su drive |
|
3 |
in2 su drive |
|
4 |
in3 su drive |
|
EtherCAT - (tipo Ultract TW) Nota: non ancora implementato. |
0 |
micro di 0 non permesso |
1 |
in0 su drive |
NOTA: L'istruzione è valida anche nel caso di collegamento CANOPEN.
Selezionare da configuratore di progetto -->assi-->tab attuatore:
•Tipo attuatore: EtherCAT Coe
•Tipo di drive: il modello di drive utilizzato e la stazione all'interno del nodo
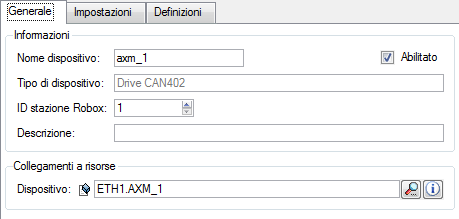
Associare un dispositivo remoto, di tipo "drive can402" all'asse appena configurato. Tale operazione permette di:
•Associare il drive (device), selezionato dall'elenco delle risorse hardware collegate alla rete (links to resources), alla Robox station ID dell'asse desiderato
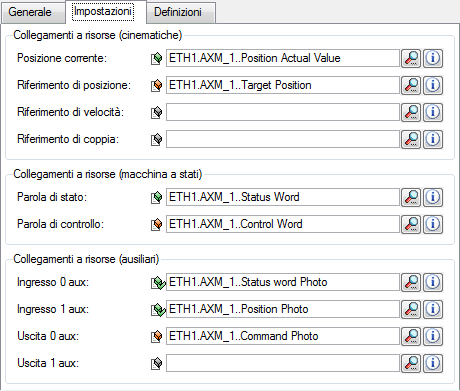
•Associare l'informazione di quota reale alla CP, l'informazione di stato alla status word, l'informazione di comando alla control word e le informazioni accessorie per le foto di quota
Associando il terminale EtherCAT (drive) a un dispositivo remoto di tipo CAN402 è possibile:
•Comunicazione sincrona mediante PDO, in accordo con il file XML
•Comunicazione asincrona mediante SDO da programma con le apposite funzioni o da shell con gli appositi comandi (vedi COE)
•Gestione della macchina a stati DS402 da parte di RTE in accordo alla configurazione del POWER SET
•Diagnostica automatica da parte di RTE circa lo stato operativo e i messaggi di emergency con gestione degli allarmi di asse
NOTA: È disponibile un esempio nei progetti predefiniti di RDE.