Funzione che permette di correggere la posizione di fase di un asse controllato (slave) che deve muoversi in funzione della posizione di un master di riferimento (es. per il controllo di nastri fasatori).

Sintassi |
real mv_phase_adj2 (i32 state, stru_phadj2 stru) |
||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
state |
Variabile contenente informazioni relative allo stato della funzione (vedi codici di reso).
|
||||||||||||||||
stru |
Struttura di tipo stru_phadj2 contenente i parametri relativi alla movimentazione. |
||||||||||||||||
Risultato |
Valore aggiornato di velocità dell'asse slave reso dalla funzione. |
||||||||||||||||
Validità |
Rule. |
||||||||||||||||
Note |
L'asse master deve sempre evolvere in senso positivo, non necessariamente a velocità costante. |

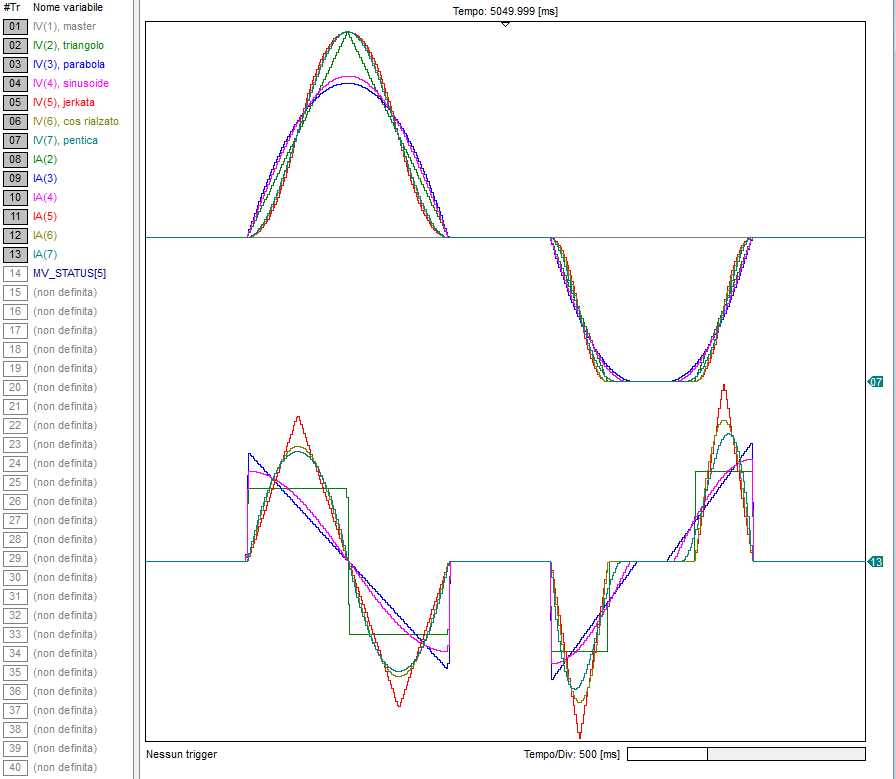
Esempio su oscilloscopio di un possibile output della funzione:
Per un esempio concreto vedi in ambiente RDE: Workspace -> Speciali -> Libreria degli esempi. |