Funzione che viene utilizzata per realizzare un movimento sincronizzato, in cui un asse (slave) si muove in continuo legato alla quota di un altro asse (master).
Il movimento dello slave comprende una prima fase (aggancio) in cui la sua velocità è proporzionale a quella del master, seguita da una seconda fase (recupero) durante la quale lo slave esegue un movimento tale da ripresentarsi, a fine ciclo, nella giusta posizione di fase e con la giusta velocità per poter iniziare, senza perturbazioni, il successivo ciclo.
Il movimento di recupero viene calcolato impiegando una legge di moto sinusoidale, con velocità di picco calcolata in funzione dei parametri di lavoro. L'asse master può essere un asse controllato, oppure un riferimento esterno (es. un encoder di linea) o anche una quota virtuale costruita e fatta evolvere da parte del software applicativo R3.
L'asse slave deve essere necessariamente un asse controllato.
Operativamente bisogna chiamare, a master fermo, la funzione con il codice M_INITIALIZING ed inizializzare tutti i parametri della funzione, eseguire quindi un posizionamento sulla quota resa dalla funzione ed abilitare poi il movimento del master.
|
|
|
real mv_crimper (i32 return, stru_crimper stru)
|
|
|
Variabile contenente informazioni relative allo stato della funzione (vedi codici di reso).
|
|
|
1 [M_INITIALING]
|
Alla prima chiamata della funzione l'utente deve impostare lo stato a M_INITIALING.
|
7 [M_HOMING]
|
È in corso la missione di recupero.
|
8 [M_SYNCHRONIZED]
|
Lo slave è agganciato al master.
|
|
|
|
Struttura di tipo stru_crimper contenente i parametri relativi alla movimentazione.
|
|
|
Valore aggiornato di posizione dell'asse slave.
|
|
|
Rule.
|
|
|
|
Esempio su oscilloscopio di un possibile output della funzione:
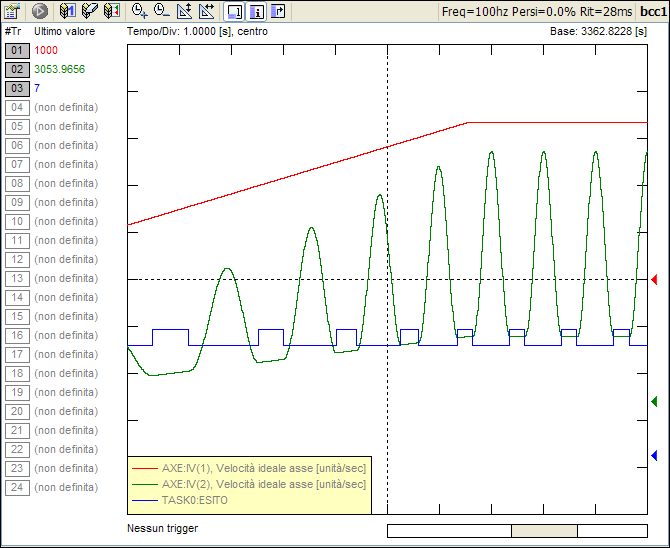
Per un esempio concreto vedi in ambiente RDE: Workspace -> Speciali -> Libreria degli esempi.
|

