Visualization of the value of the specified CANOpen/CoE/SoE object.
Syntax |
CO_ROBJ -s -u=-s -f=-s nWs -r nn obj -r nn sbIndex -r nn |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
nWs |
Robox station ID |
||||||||||||
obj |
Object number (optional) |
||||||||||||
subIndex |
Object subindex (optional) If EtherCAT (SoE)
|
||||||||||||
-r |
Number of repetitions for the preceding option (optional) |
||||||||||||
-s |
Data of type signed (optional) |
||||||||||||
-u |
Data of type unsigned (optional, default -s) |
||||||||||||
-f |
Data of type float (optional, default -s) |
||||||||||||
Notes |
Example
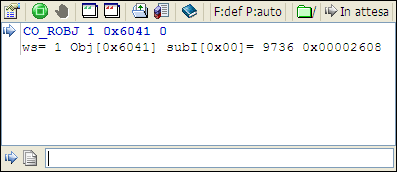
I read the status word of workstation 1 via the CO_ROBJ 1 0x6041 0 command. Workstation 1 returns the value 0x00002608.
|