Function to correct the phase position of a controlled axis (slave) that has to move according to the position of a reference master (e.g., for controlling phasing belts).

Syntax |
real mv_phase_adj2 (i32 state, stru_phadj2 stru) |
||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
state |
Variable containing information about the state of the function (see returns codes).
|
||||||||||||||||
stru |
Structure of type stru_phadj2 containing motion-related parameters |
||||||||||||||||
Result |
Updated velocity value of the slave axis returned by the function |
||||||||||||||||
Validity |
Rule |
||||||||||||||||
Note |
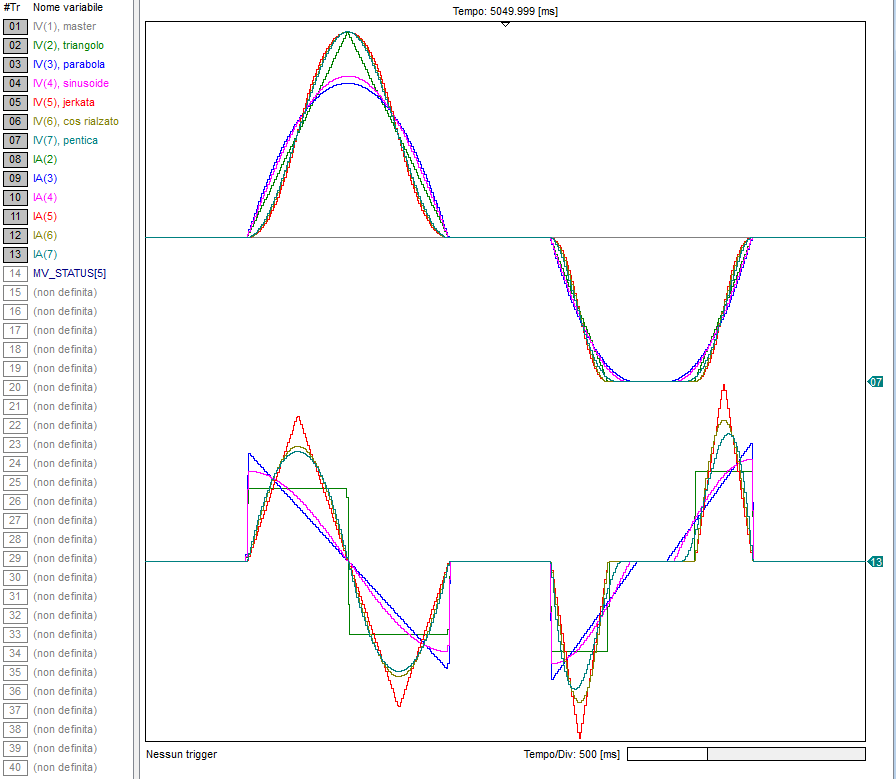
The master axis must always evolve in the positive direction, not necessarily at constant speed |

Example on oscilloscope of a possible output of the function:
For a concrete example see in the RDE environment: Workspace -> Specials -> Examples Library. |