Per gestire in modalità avanzata i drive Parker collegati in CANOpen è necessario configurare opportunamente il trasduttore e l'attuatore dell'asse in questione attraverso il configuratore di progetto.
La modalità avanzata permette di:
•Gestire diversi tipi di homing (MVA_ZC). Esempio tipico e la foto di quota su micro o la ricerca del micro con successiva ricerca della posizione del motore all'interno del giro
•Utilizzare da applicativo l'istruzione POS_CAPTURE_STS
•Diagnostica estesa (verbosa) dei messaggi di emergency (se abilitata)
Operazioni da eseguire:
Selezionare da configuratore di progetto -->assi-->tab trasduttore:
•Tipo trasduttore: CANOpen
•Tipo di drive: il modello di drive utilizzato
•Parametro ausiliario 1: rappresenta il canale di input digitale dove fisicamente viene cablato il sensore di homing
Se trasduttore selezionato =CANOPEN PARKER - SBC (tipo HID 1) |
|
0 |
foto immediata dell'inizio del giro resolver o foto su canale |
1 |
in0 su drive |
2 |
in1 su drive |
3 |
in2 su drive |
<0 |
disabilita cattura |
Se trasduttore selezionato = CANOPEN PARKER - SBC (tipo SLVD 1) |
|
0 |
foto immediata dell'inizio del giro resolver o foto su canale |
1 |
in0 su drive |
<0 |
disabilita cattura |
Selezionare da configuratore di progetto -->assi-->tab attuatore:
•Tipo attuatore: CANOpen
•Tipo di drive: il modello di drive utilizzato
NOTA: Nel file coc va chiaramente utilizzato il modello opportuno (hidrive_ipmode_3_rev2, slvdn_ipmode_3_rev2 o tpdm_ipmode_1_rev1 o superiori).
Esempio di linea canbus popolata da 1 hidrive, 1 slvdn ed un tpdm.
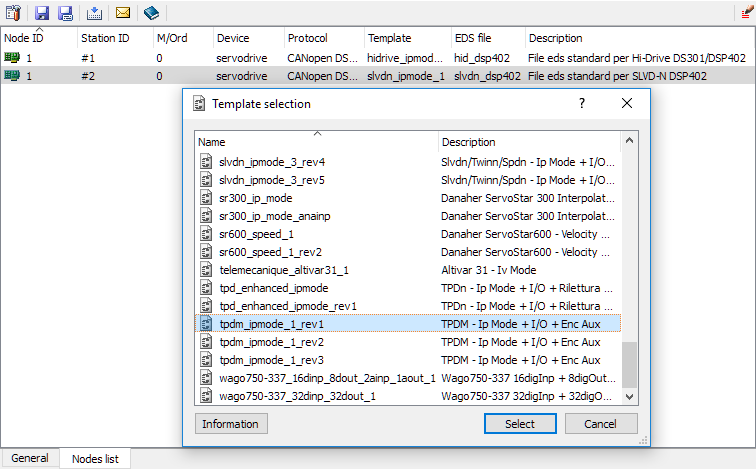
Selezionando i modelli si avrà, in fase di boot del sistema, la parametrizzazione da parte del master del drive e la scrittura del programma pico-plc opportuno.
Le operazioni da eseguire lato drive, mediante l'ambiente di programmazione "motion wiz", sono la parametrizzazione del motore connesso,il tipo di trasduttore, la taratura dell'asse (anello di posizione/velocità) e
l'assegnazione della workstation e del baudrate.
NOTA: Da shell RDE è disponibile il comando "sbcdrive" per l'accesso diretto ai parametri del drive indicato.