Validità: Rule
Caso unico: l'asse parte dal punto PS
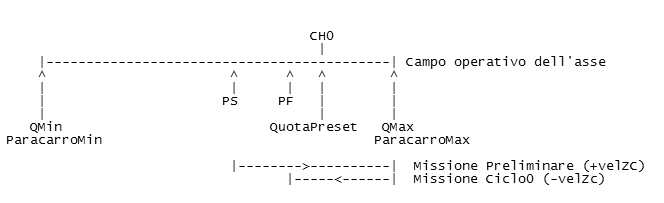
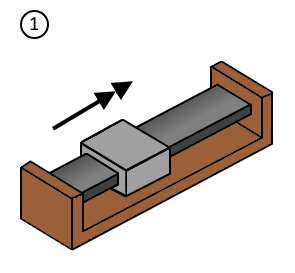
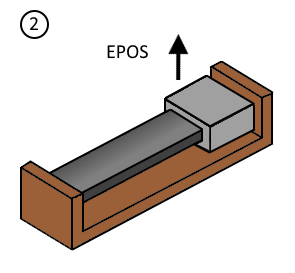
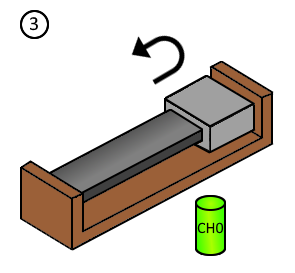
Fasi: a)Viene disabilitato l'allarme servo (sam) dell'asse. b)Missione preliminare (ricerca paracarro): l'asse muove alla velocità (+velZC) fino a riscontrare le condizioni "abs(cv) < zc.velZC/1000.0" e "abs(ip-cp) > zc.velPos". c)Viene reimpostato il valore precedente sulla maschera SAM relativo all'asse. d)Missione finale (CICLO0): l'asse muove alla velocità (-velZC) fino a riscontrare il CH0 dell'encoder, quindi decelera e si arresta in posizione PF. e)Si assegna come nuova quota reale il valore ottenuto sommando al parametro Preset il delta di quote (PF-quota letta sul primo CH0). f)Si aggiorna la variabile predefinita c0_done ponendo a 1 il bit relativo all'asse. |
Legenda: •PS, punto di start iniziale per la mva_zc() •PF, punto di arresto finale per la mva_zc() •Qmin, quota minima dell'asse (min_str) •Qmax, quota massima dell'asse (max_str) •CH0, canale di 0 dell'encoder incrementale |

|
Esempio di utilizzo:
|