Validità: Rule
Caso unico, l'asse parte dal punto PS
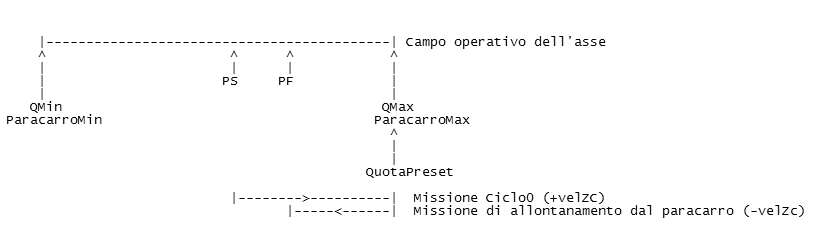
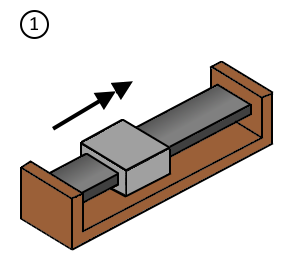
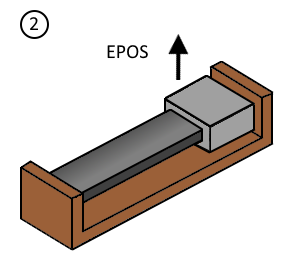
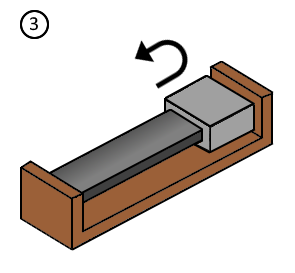
Fasi: a)Viene disabilitato l'allarme servo (sam) dell'asse. b)Missione di CICLO0 (ricerca paracarro): l'asse muove alla velocità (+velZC) fino a riscontrare le condizioni "abs(cv) < zc.velZC/1000.0" e "abs(ip-cp) > zc.velPos". c)Viene reimpostato il valore precedente sulla maschera SAM relativo all'asse. d)Missione di allontanamento dal paracarro: l'asse muove alla velocità (-velZC) fino a percorrere uno spazio almeno pari a "zc.spSCh" e si arresta in posizione PF. e)Si assegna come nuova quota reale il valore ottenuto sottraendo al parametro Preset (quota su paracarro) il valore di quota del punto PF. f)Si aggiorna la variabile predefinita c0_done ponendo a 1 il bit relativo all'asse. |
Legenda: •PS, punto di start iniziale per la mva_zc() •PF, punto di arresto finale per la mva_zc() •Qmin, quota minima dell'asse (min_str) •Qmax, quota massima dell'asse (max_str) |

|
Esempio di utilizzo:
|