Validità: Rule
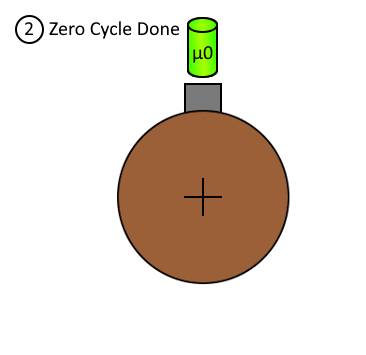
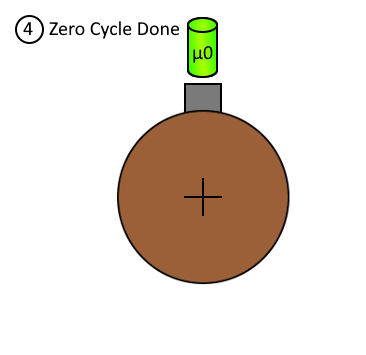
Caso 1: l'asse parte dal punto PS in zona A.
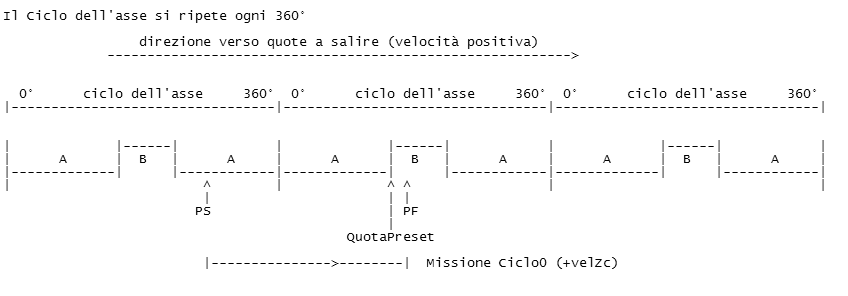
Fasi: a)Viene letto lo stato del micro per poter definire da quale movimentazione partire. b)Missione finale (CICLO0): si esegue il movimento finale con una corsa massima pari al valore del parametro spSch, con la velocità imposta (+velZc). c)Si assegna come nuova quota reale il valore ottenuto sommando al parametro Preset il delta di quote (PF-quota letta sul fronte a salire del micro). d)Si aggiorna la variabile predefinita c0_done ponendo a 1 il bit relativo all'asse. |
Legenda: •A, zona in cui il micro legge 0 •B, zona in cui il micro legge 1 •PS, punto di start iniziale per la mva_zc() •PF, punto di arresto finale per la mva_zc()
|
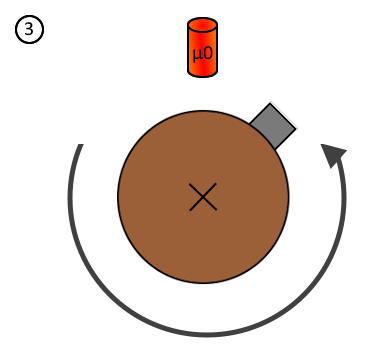
Caso 2: l'asse parte dal punto PS in zona B.
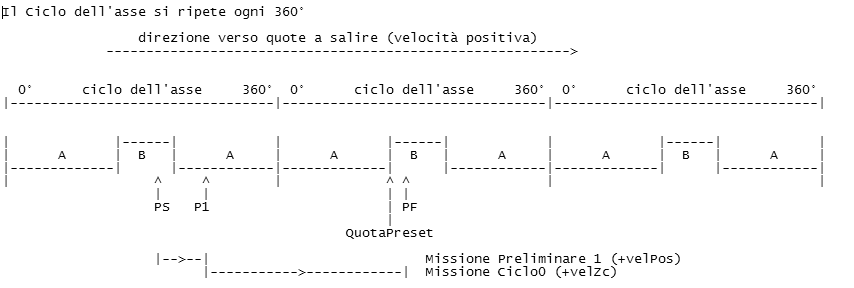
Fasi: a)Viene letto lo stato del micro per poter definire da quale movimentazione partire. b)Missione preliminare 1: l'asse muove alla velocità (+velPos) fino a riscontrare il fronte a scendere del micro, quindi decelera e si arresta in posizione P1. c)Missione finale (CICLO0): si esegue il movimento finale con una corsa massima pari al valore del parametro spSch, con la velocità imposta (+velZc). d)Si assegna come nuova quota reale il valore ottenuto sommando al parametro Preset il delta di quote (PF-quota letta sul fronte a salire del micro). e)Si aggiorna la variabile predefinita c0_done ponendo a 1 il bit relativo all'asse |
Leggenda: •A, zona in cui il micro legge 0 •B, zona in cui il micro legge 1 •PS, punto di start iniziale per la mva_zc() •PF, punto di arresto finale per la mva_zc() •P1, punto intermedio 1
|
 | Esempio grafico |
|

Esempio di utilizzo:
|