To manage Parker drives connected in CANOpen in advanced mode, it is necessary to properly configure the transducer and actuator of the axis in question through the project configurator.
The advanced mode allows you to:
•Manage different types of homing(MVA_ZC). Typical examples are quota snapshot on micro or micro homing with subsequent search for motor position within the revolution
•Use POS_CAPTURE_STS instruction from application
•Extended (verbose) diagnostic of emergency messages (if enabled)
Operations to perform:
Select from project configurator-->axes-->tab transducer:
•Transducer type: CANOpen
•Drive type: the drive model used
•Auxiliary parameter 1: represents the digital input channel where the homing sensor is physically wired
If transducer selected =CANOPEN PARKER - SBC (type HID 1) |
|
0 |
Immediate photo of resolver rotation start or photo on channel |
1 |
in0 on drive |
2 |
in1 on drive |
3 |
in2 on drive |
<0 |
disable capture |
If transducer selected = CANOPEN PARKER - SBC (type SLVD 1) |
|
0 |
Immediate photo of resolver rotation start or photo on channel |
1 |
in0 on drive |
<0 |
disable capture |
Select from project configurator-->axes-->tab actuator:
•Actuator type: CANOpen
•Drive type: the drive model used
NOTE: The appropriate model should clearly be used in the coc file (hidrive_ipmode_3_rev2, slvdn_ipmode_3_rev2 or tpdm_ipmode_1_rev1 or higher).
Example of a canbus line populated by 1 hidrive, 1 slvdn and a tpdm
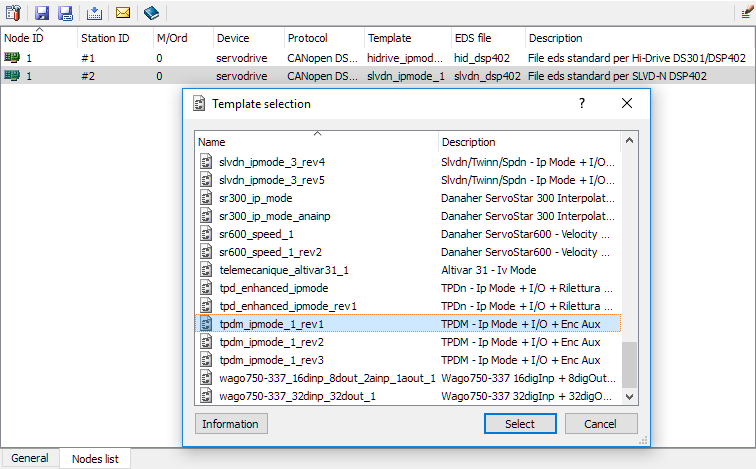
Selecting the models will result in, at system boot, parameterization by the drive master and writing the appropriate pico-plc program.
The operations to be performed on the drive side, via the "motion wiz" programming environment, are the parameterization of the connected motor,transducer type, axis calibration (position/speed loop) and the assignment of the workstation and baud rate.
NOTE: From RDE shell, the "sbcdrive" command is available for direct access to the parameters of the indicated drive.