Di seguito viene spiegato come configurare il "Position Capture" a seconda del drive EtherCAT (COE) utilizzato. A seconda del tipo di driver gli oggetti CANopen da utilizzare sono diversi.
Una volta selezionato il "Tipo di drive" nella finestra Trasduttore della schermata di configurazione dell'asse, gli oggetti CANopen necessari saranno visualizzati nella finestra Bus di campo -> Collegamenti sotto Risorse ausiliarie.
Segnalibri
Drive generico
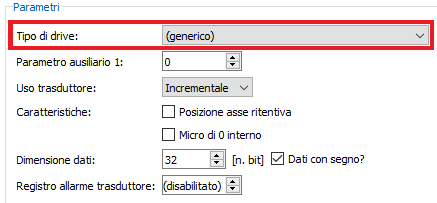
Per driver "generici" si intende tutti quelli che non sono presenti nella lista del campo "Tipo di drive". Per questi driver bisogna selezionare "(generico)":
Un drive che supporta il "Position capture" gestisce i seguenti oggetti:
Oggetti |
Significato |
M = Obbligatori / O = Opzionale |
|---|---|---|
60B8:0 |
Touch probe function (con accesso in r/w) |
M |
60B9:0 |
Touch probe status |
M |
60BA:0 |
Touch probe 1 positive edge |
O |
60B3:0 |
Touch probe 1 negative edge |
O |
60D0:1 |
Touch probe source |
- |
60D5:0 |
Touch probe 1 positive edge counter (solo per cattura continua) |
M |
60D6:0 |
Touch probe 1 negative edge counter (solo per cattura continua) |
M |
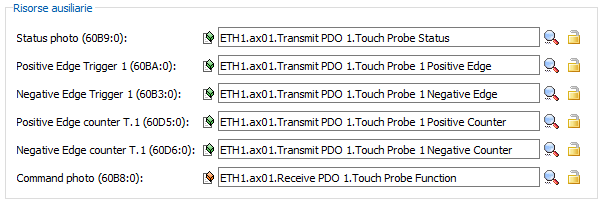
Gli oggetti "Touch probe status" 0x60B9 e "Touch probe function" 0x60B8 devono essere mappati sui PDO ciclici.
Gli oggetti vanno mappati nella schermata di configurazione dell'asse -> Bus di campo -> Collegamenti:
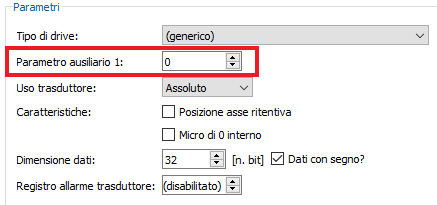
Nella definizione della configurazione del trasduttore il campo "Parametro ausiliario 1" può assumere i seguenti valori (schermata di configurazione dell'asse -> Trasduttore):
Valori |
Descrizione |
|---|---|
0 |
cattura solo su ch0 |
1 |
utilizza input 1 del drive come touch probe input |
2 |
utilizza input 2 del drive (se disponibile) come touch probe input |
3 |
utilizza input 3 del drive (se disponibile) come touch probe input |
4 |
utilizza input 4 del drive (se disponibile) come touch probe input |
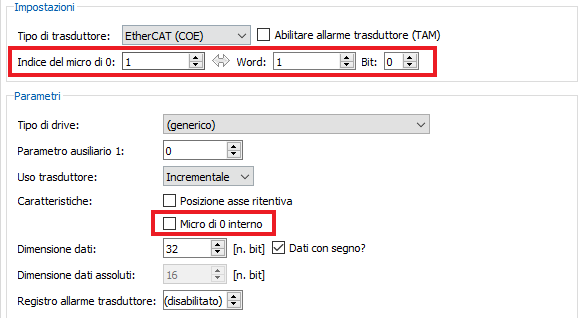
Deve essere inoltre configurato il campo "Indice del micro di 0" corrispondente al campo "Parametro ausiliario 1" specificato e deve essere impostato il flag "Micro di 0 interno" (schermata di configurazione dell'asse -> Trasduttore):
Drive Robox RID20
Nella schermata di configurazione dell'asse -> Trasduttore -> Tipo di drive, selezionare "Robox RID20E":
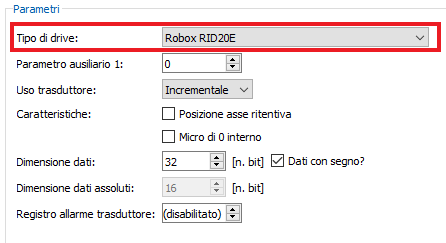
Gli oggetti "Status photo" 0x5110:2 e "Command photo" 0x5110:1 devono essere mappati nei PDO: schermata di configurazione dell'asse -> Bus di campo -> Collegamenti.

Drive Robox IMD
Nella schermata di configurazione dell'asse -> Trasduttore -> Tipo di drive, selezionare "Robox IMD20":
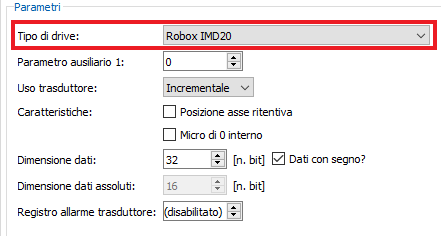
Gli oggetti "Status photo" 0x5110:2 e "Command photo" 0x5110:1 devono essere mappati nei PDO: schermata di configurazione dell'asse -> Bus di campo -> Collegamenti.
Drive Nidec Digitax M753
I drive NIDEC hanno la peculiarità di non permettere la modifica dei parametri di configurazione della funzione standard COE di Touch Probe quando l’asse è abilitato e non gestiscono in modo autonomo la sorgente del segnale di "canale di 0" del trasduttore.
Questa particolarità influenza principalmente 2 funzioni dell’RTE:
•MVA_ZC che esegue il ciclo di zero dell’asse nel caso sia richiesta la modalità "full precision" (zcFlag.2)
•la funzione di POS_CAPTURE
NOTA: Usare sempre 0 come indice del micro.
Per utilizzare il Touch Probe (su Homing e Pos_capture) con i drive NIDEC si deve procedere come descritto in seguito.
Nella schermata di configurazione dell'asse -> Trasduttore -> Tipo di drive, selezionare "Nidec M753":
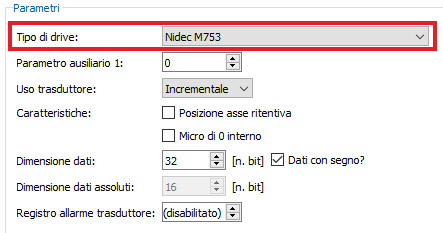
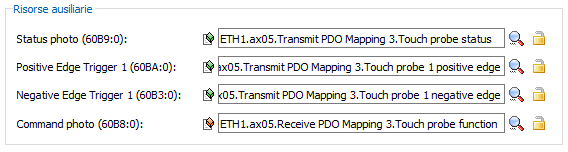
Gli oggetti "Status photo" 0x60B9:0, "Command photo" 0x60B8:0, "Positive Edge Trigger 1" 0x60BA:0 e "Negative Edge Trigger 1" 0x60B3:0 devono essere mappati nei PDO: schermata di configurazione dell'asse -> Bus di campo -> Collegamenti.
Nella definizione della configurazione del trasduttore il campo "Parametro ausiliario 1" può assumere i valori:
Valore |
Descrizione |
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
0 |
•il micro (se necessita) deve essere connesso all'input digitale 4 del drive •è possibile usare full precision solo se il trasduttore ha canale fisico 0 collegato al trasduttore 1 del drive NOTA: Per essere in condizione di effettuare la cattura hardware della posizione, la funzione POS_CAPTURE deve essere eseguita almeno una volta prima di abilitare il drive. |
|||||||||||||||
1 |
La cattura di posizione del drive è selezionata tramite l'oggetto 0x60D0:1. Si deve impostare a drive disabilitato.
|
|||||||||||||||
2 |
Ha le stesse caratteristiche del valore 1, ma il contenuto dell'oggetto 0x60D0:1 è inizializzato leggendo dal drive il parametro 03.100 (F1 Freeze Trigger Source Value) |