Visualizzazione del valore dell'oggetto CANOpen/CoE/SoE specificato.
Sintassi |
CO_ROBJ -s -u=-s -f=-s nWs -r nn obj -r nn sbIndex -r nn |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
nWs |
ID stazione Robox |
||||||||||||
obj |
Numero dell'oggetto (opzionale) |
||||||||||||
subIndex |
Sottoindice dell'oggetto (opzionale) Se EtherCAT (SoE)
|
||||||||||||
-r |
Numero di ripetizioni per l'opzione che precede (opzionale) |
||||||||||||
-s |
Dato di tipo signed (opzionale) |
||||||||||||
-u |
Dato di tipo unsigned (opzionale, default -s) |
||||||||||||
-f |
Dato di tipo float (opzionale, default -s) |
||||||||||||
Note |
Esempio
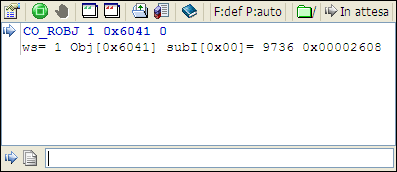
Leggo la status word della workstation 1 tramite il comando CO_ROBJ 1 0x6041 0 La workstation 1 restituisce il valore 0x00002608.
|