Validity: Rule
Unique case, the axis starts from the PS point
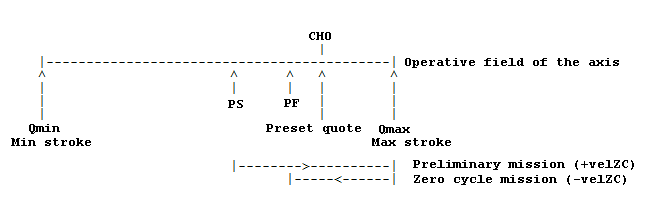
Phases: •The servo alarm (SAM) of the axis is disabled. •Preliminary mission (search for the end of stroke): the axis moves at the speed (+velZC) until the conditions "abs(CV) < zc.velZC/1000.0" and "abs(IP-CP) > zc.velPos" are met. •The previous value is set again on the SAM mask related to the axis. •CYCLE0 final mission: the axis moves at the velocity (-velZC) until it reach the CH0 encoder, then decelerates and stops at the PF position. •The value obtained by adding the position delta (PF-value read on the first CH0) to the Preset parameter, is assigned as the new real quote. •The predefined variable c0_done is updated by setting the axis related bit to 1. |
Legend: •PS, initial start point for mva_zc() •PF, target stop point for mva_zc() •Qmin, axis minimum position (min_str) •Qmax, axis maximum position (max_str) •CH0, 0 channel of the incremental encoder |

Example of use:
|