Validity: Rule
Unique case, the axis starts from the PS point
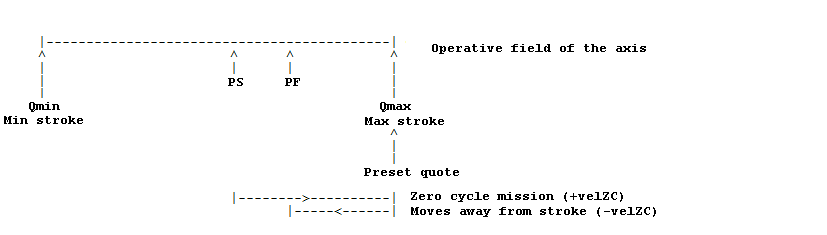
Phases: •The servo alarm (SAM) of the axis is disabled. •CYCLE0 mission (search for the end of stroke): the axis moves at the speed (+velZC) until the conditions "abs(CV) < zc.velZC/1000.0" and "abs(IP-CP) > zc.velPos" are met. •The previous value is set again on the SAM mask related to the axis. •The axis moves away from the end of stroke: the axis moves at the velocity (-velZC) until it travels a space at least equal to zc.spSCh and stops at the PF position. •The value obtained by subtracting the value of the PF point from the Preset parameter is assigned as the new real quote. •The predefined variable c0_done is updated by setting the axis related bit to 1. |
Legend: •PS, initial start point for mva_zc() •PF, target stop point for mva_zc() •Qmin, axis minimum position (min_str) •Qmax, axis maximum position (max_str) |

Example of use:
|