Validity: Rule
Case 1: The axis starts from the PS point in area A
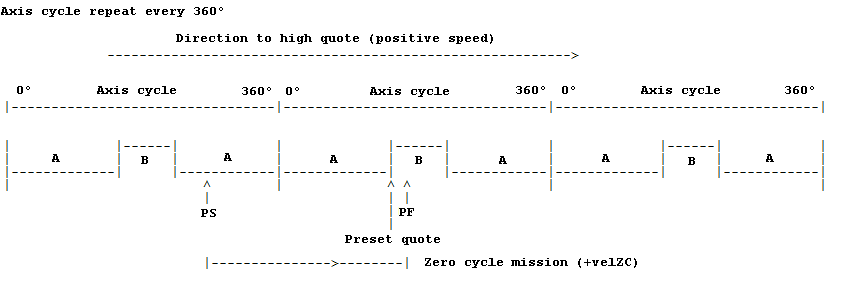
Phases: •The micro state is read to define the first movement. •Since the micro is in 0 and cycle0 is completed with micro in 1, no additional preliminary missions are required. •Final mission (CYCLE0): the final movement is performed with a maximum stroke equal to the value of the spSch parameter, with the set speed (+velZc). •The value obtained by summing the delta quote (PF-quote read at the rising edge of the micro) to the Preset parameter, is assigned as new real quote. •The predefined variable c0_done is updated by setting the axis related bit to 1. |
Legend: •A, area where the micro reads 0 •B, area where the micro reads 1 •PS, initial start point for mva_zc() •PF, target stop point for mva_zc()
|
Case 2: the axis starts from the PS point in area B
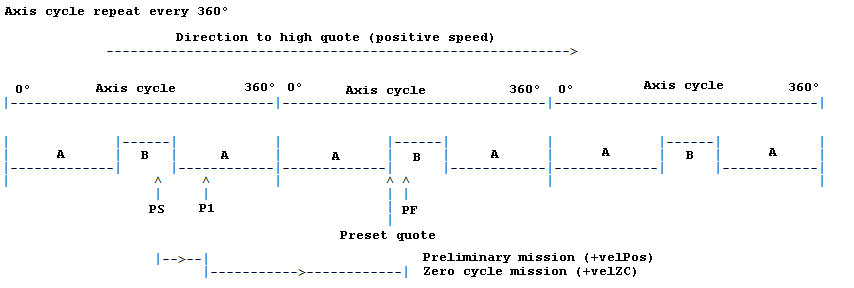
Phases: •The micro state is read to define the first movement. •Since the micro is in 1 and cycle0 is completed with micro in 1, a preliminary mission is needed. •Preliminary Mission 1: the axis moves at speed (+velPos) until it encounters the micro falling edge, then it decelerates and stops in P1. •Final mission (CYCLE0): the final movement is performed with a maximum stroke equal to the value of the spSch parameter, with the set speed (+velZc). •The value obtained by subtracting the delta quote (PF-quote read at the rising edge of the micro) to the Preset parameter, is assigned as new real quote. •The predefined variable c0_done is updated by setting the axis related bit to 1. |
Legend: •A, area where the micro reads 0 •B, area where the micro reads 1 •PS, initial start point for mva_zc() •PF, target stop point for mva_zc() •P1, point intermediate
|

Example of use:
|