Di seguito viene spiegato come configurare il "Position Capture" a seconda del drive CANopen utilizzato. A seconda del tipo di driver gli oggetti CANopen da utilizzare sono diversi.
Drive generico
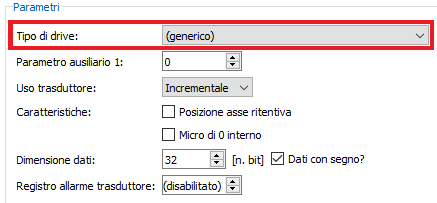
Per driver "generici" si intende tutti quelli che non sono presenti nella lista del campo "Tipo di drive". Per questi driver bisogna selezionare "(generico)":
Un drive che supporta il "Position capture" gestisce i seguenti oggetti:
Oggetti |
Significato |
Da collegare a |
M = Obbligatori / O = Opzionale |
|---|---|---|---|
60B8:0 |
Touch probe function (con accesso in r/w) |
Uscita 0 aux |
M |
60B9:0 |
Touch probe status |
Ingresso 0 aux |
M |
60BA:0 |
Touch probe 1 positive edge |
Ingresso 1 aux |
O |
60B3:0 |
Touch probe 1 negative edge |
Ingresso 2 aux |
O |
60D0:1 |
Touch probe source |
- |
- |
60D5:0 |
Touch probe 1 positive edge counter (solo per cattura continua) |
Ingresso 3 aux |
M |
60D6:0 |
Touch probe 1 negative edge counter (solo per cattura continua) |
Ingresso 4 aux |
M |
Gli oggetti "Touch probe status" 0x60B9 e "Touch probe function" 0x60B8 devono essere mappati sui PDO ciclici.
La mappatura deve essere fatta secondo la precedente tabella nell'editor CANopen, nella finestra di configurazione del nodo.
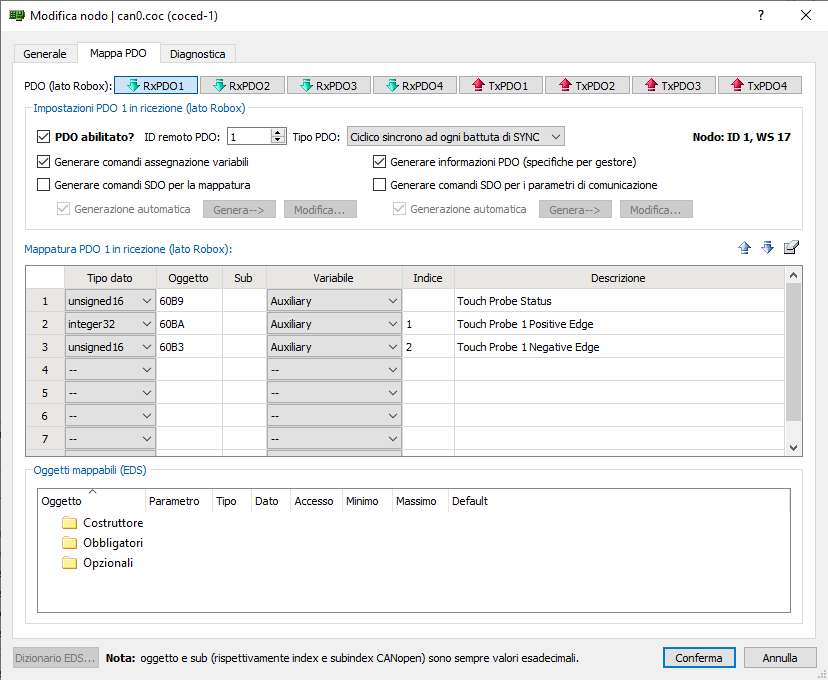
Esempio di mappatura, gli oggetti 0x60B9, 0x60BA e 0x60B3 sono mappati nel RxPDO 1:
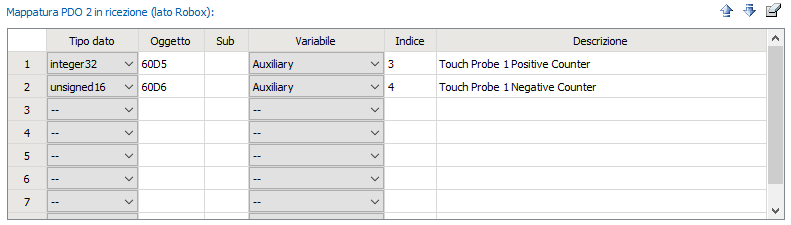
Gli oggetti 0x60D5 e 0x60D6 sono mappati nel RxPDO 2:
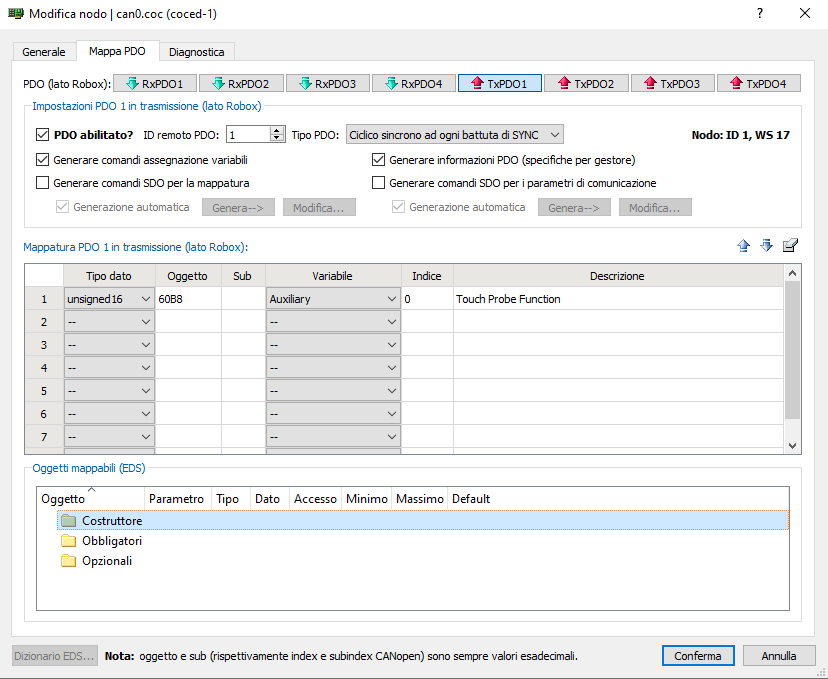
L'oggetto 0x60B8 è mappato nel TxPDO 1:
Nella definizione della configurazione del trasduttore il campo "Parametro ausiliario 1" può assumere i seguenti valori (schermata di configurazione dell'asse -> Trasduttore):
Valori |
Descrizione |
|---|---|
0 |
cattura solo su ch0 |
1 |
utilizza input 1 del drive come touch probe input |
2 |
utilizza input 2 del drive (se disponibile) come touch probe input |
3 |
utilizza input 3 del drive (se disponibile) come touch probe input |
4 |
utilizza input 4 del drive (se disponibile) come touch probe input |
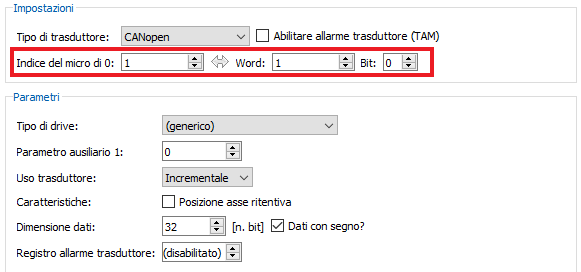
Deve essere inoltre configurato il campo "Indice del micro di 0" corrispondente al campo "Parametro ausiliario 1" specificato (schermata di configurazione dell'asse -> Trasduttore):